Tag: Web Control
LED Matrix Bar Weather Station V4 – Design
LED Matrix Bar Weather Station V3 – Design
LED Matrix Bar Weather Station V2 – Design
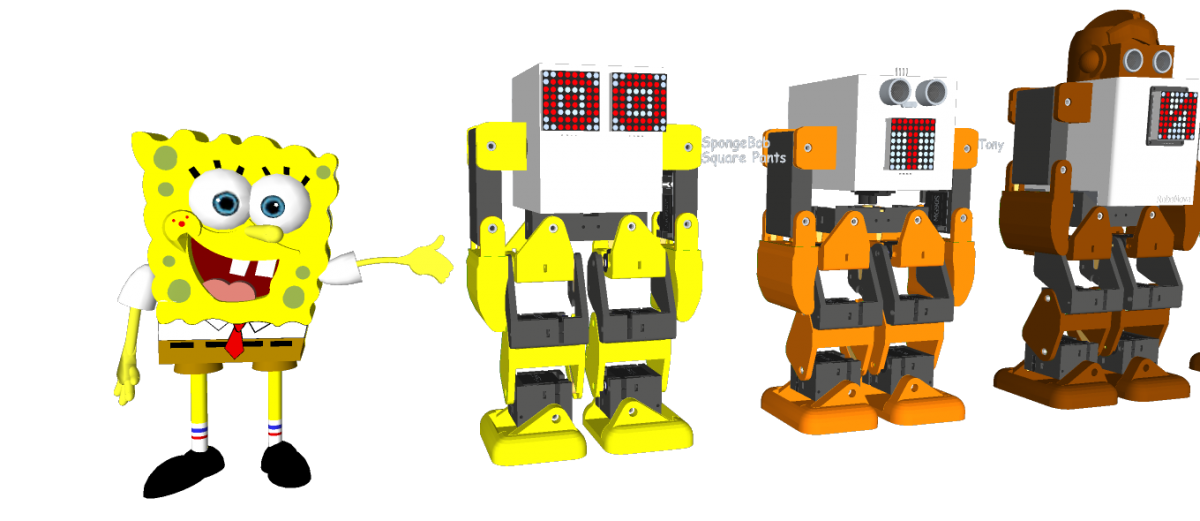
3D Printed Humanoid Robot – Robonoid – LineUp – 20180621
[20190107] Upload Links
[20181101] Printing
[20180621] Update Design concept
[20180619] Update Design concept
[20180607] Update Design concept
[20180604] Update Design concept
[20180430] Design concept
Humanoid Robot – Robonoid – Design concept – https://youtu.be/n-flpiyNw-M
3D Design Tool: SketchUp Pro
Robonoid is small sized bipedal walking robot The robot has 17 or 19, 24 freely moveable joints and servomotor in order to provide for a range of action and stable movements. Since it’s small in size, Robonoid can balance well and cope with basic movements such as walking and getting up. Also, intricate movements like roller skating and skateboarding are possible.
Robonoid is a wireless controllable robot You can control it by WiFi protocol through your PC and Smartphones. App for android and iOS are an especially intelligible UI. By using it, complicated operations can be controlled more easily.
Robonoid is a friendly robot Robonoid was named indicates a “simply shaped robot” that everyone imagines. Robonoid was designed by pursuing a simple appearance and simple functionality.
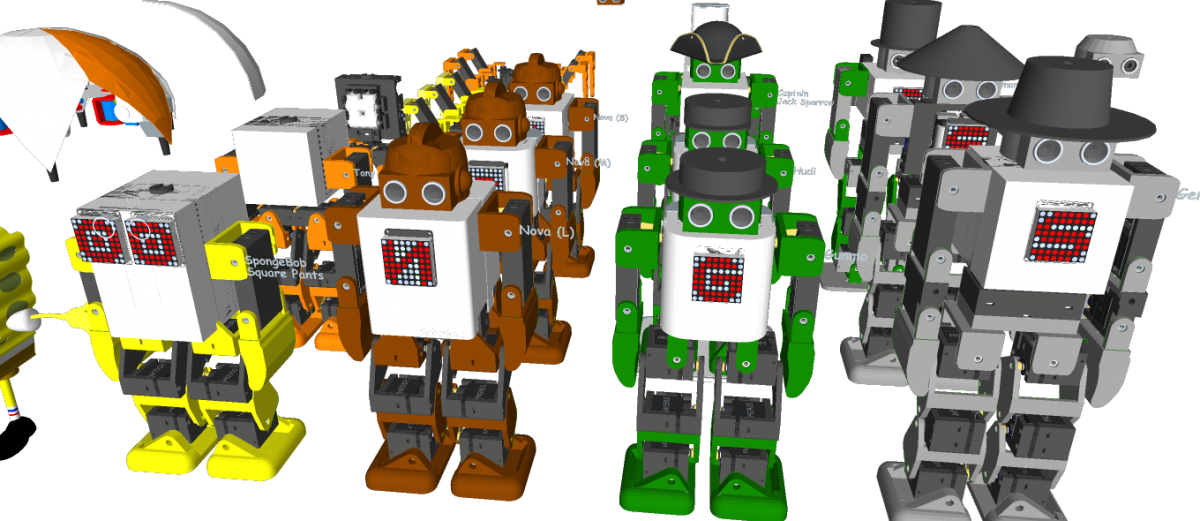
Robonoid Lineup
PSY – 135.7mm(W) x 258.39mm(H) x 100mm(D) – 17DOF
Jack – 135.7mm(W) x 305.62mm(H) x – 92,48mm(D) – 22DOF
Gentleman – 135.7mm(W) x 341.22mm(H) x – 78.5mm(D) – 22DOF
Tony – 135.7mm(W) x 265.5mm(H) x – 100mm(D) – 18DOF
SpongwBob – 135.7mm(W) x 230.0mm(H) x 100mm(D) – 16DOF
Hudi – 135.7mm(W) x 251.4mm(H) x 87mm(D) – 19DOF
Gunmo – 135.7mm(W) x 259.3mm(H) x 78.5mm(D) – 19DOF – https://youtu.be/qIZJZDcRpVw
Nova – 135.7mm(W) x 282.8mm(H) x 100mm(D) – 17DOF – https://youtu.be/kzfyKRzp_9I
Hexapod S1 – DOM 352.83mm(WD) x 193.16mm(H) – 20DOF
Robonoid is a Plen/mini-Plan/RoboHero robot derivative designed at Zalophus DesignHouse. We love the Plen2 robot but its want to new design. This is our take on a new lower cost version of the Plen2 robot using MG90S/ES08MA-II/SG90 servo’s.
The 3D printing parts were inspired by the Plen2 components, but they were redrawn from SketchUp to use the inexpensive MG90S servo motors.
Electronic Parts
1 x WeMos D1 mini ESP8266 ESP-12
1 x PCA9685 16-channel, 12-bit PWM Fm+ I2C-bus Servo controller
1 x Shield Robonoid-20CH-R0a
1 x HC-SR04 Ultrasonic Distance Measurement Sensor
2 x 16340 or 18650 Battery Holder
1 x 2S 7.4V Lithium Battery Charger Protection Board
2 x 16340 or 18650 Batteries
2 x Snap-In Single ‘A’-‘AA’ Battery Contacts 209 [KEYSTONE ELECTRONICS CORP.]
2 x Snap-In Single ‘A’-‘AA’ Battery Contacts 228 [KEYSTONE ELECTRONICS CORP.]
1 x DC Jack and Battery Harness Cable
17/19 x MG90S Metal Gear Servo Motors
3D Printing Parts
- Robonoid_BatteryBracket16340.stl ……https://pinshape.com/items/49080
- Robonoid_BatteryHolder18650.stl …..https://pinshape.com/items/49082
- Robonoid_BodyGentleman.stl ……..https://pinshape.com/items/49105
- Robonoid_BodyGunmo.stl …….https://pinshape.com/items/49100
- Robonoid_BodyHudi.stl ……https://pinshape.com/items/49098
- Robonoid_BodyNovaL.stl …….https://pinshape.com/items/49101
- Robonoid_BodySpongeBob.stl ……………”
- Robonoid_BodyNovaS.stl …..https://pinshape.com/items/49103
- Robonoid_BodyTony.stl …….https://pinshape.com/items/49102
- Robonoid_BodyTonyPants.stl ……”
- Robonoid_BodyTonyServoBracket.stl ……”
Robonoid_CapBaseball.stl ……https://pinshape.com/items/49095 - Robonoid_CapHudi.stl ………………..”
Robonoid_eYeLED5.stl ……….https://pinshape.com/items/49106
Robonoid_eYeWS2812.stl …….https://pinshape.com/items/49107
Robonoid_HatBoaterGunmo.stl ……https://pinshape.com/items/49093 - Robonoid_HatConical.stl ……………….”
- Robonoid_HatFes.stl ……………………..”
- Robonoid_HatTC.stl ……………………..”
- Robonoid_HatTop.stl …………………….”
Robonoid_Head.stl ……https://pinshape.com/items/49091
Robonoid_HeadNova.stl …….https://pinshape.com/items/49000
Robonoid_ElbowShoulderRol_Leftl.stl …….https://pinshape.com/items/49071
Robonoid_Foot_Left.stl …….https://pinshape.com/items/49057
Robonoid_FootSlim_Left.stl …….https://pinshape.com/items/49057
Robonoid_FootSimple_Left.stl ……..https://pinshape.com/items/49057
Robonoid_FootRollPitch_Left.stl …….https://pinshape.com/items/49063
Robonoid_Hand_Left.stl ……..https://pinshape.com/items/49070
Robonoid_HandWristShoulderPitchThighYawFoot_Left.stl ….https://pinshape.com/items/49072
Robonoid_Knee_Left.stl ……https://pinshape.com/items/49064
Robonoid_KneePitch_Left.stl ……..https://pinshape.com/items/49067
Robonoid_ShoulderPitch_Left.stl ……..https://pinshape.com/items/49072
Robonoid_ThighPitchHipRollNova_Left.stl ……..https://pinshape.com/items/49068
Robonoid_ThighPitchRoll_Left.stl ……https://pinshape.com/items/49063
Robonoid_Pants.stl …….https://pinshape.com/items/49105
Robonoid_PantsBottom.stl ……………”
WANT TO SUPPORT Zalophus’s DesignHouse?
The open source Humanoid Robot – Robonoid hardware and software is free and made with love. Please show your level of support with a voluntary donation.
Donate: https://www.paypal.com/cgi-bin/webscr?cmd=_s-xclick&hosted_button_id=RDN7ZGAVFS5UE
3D Printed Hexapod Robot – Robonoid – H1 – Design concept – Update – 20180621

___
Hexapod Robot – Robonoid – H1 -Design concept
___
Update design concept 20180621]
– Parts Update: pinshape: https://pinshape.com/items/26844
Update design concept 20170418]
– Parts Upload: pinshape: https://pinshape.com/items/26844
[ Upload design concept 20161001]
___
3D Printer: PANDORA DXs – DIY Desktop 3D Printer
3D Design Tool: SketchUp Pro
Robonoid is small sized bipedal walking robot
The robot has 20 freely moveable joints and servomotor in order to provide for a range of action and stable movements. Since it’s small in size, Robonoid can balance well and cope with basic movements such as walking and getting up. Also, intricate movements like roller skating and skateboarding are possible.
Robonoid is a wireless controllable robot
You can control it by WiFi protocol through your PC and Smartphones. App for android and iOS are an especially intelligible UI. By using it, complicated operations can be controlled more easily.
Robonoid is a friendly robot
Robonoid was named indicates a “simply shaped robot” that everyone imagines. Robonoid was designed by pursuing a simple appearance and simple functionality.
Robonoid Lineup
– Papi – 28DOF
– S6 – 20DOF
– S4 – 14DOF
– PSY – 135.7mm(W) x 258.39mm(H) x 100mm(D) – 17DOF
– Jack – 135.7mm(W) x 305.62mm(H) x – 92,48mm(D) – 22DOF
– Gentleman – 135.7mm(W) x 341.22mm(H) x – 78.5mm(D) – 22DOF
– Tony – 135.7mm(W) x 265.5mm(H) x – 100mm(D) – 18DOF
– SpongwBob – 135.7mm(W) x 230.0mm(H) x 100mm(D) – 16DOF
– Hudi – 135.7mm(W) x 251.4mm(H) x 87mm(D) – 19DOF
– Gunmo – 135.7mm(W) x 259.3mm(H) x 78.5mm(D) – 19DOF
– Nova – 135.7mm(W) x 282.8mm(H) x 100mm(D) – 17DOF
– M1 – 180.7mm(W) x 350.74mm(H) x 110mm(D) – 24DOF
– Hexapod H1 – DOM 352.83mm(WD) x 193.16mm(H) – 20DOF
Robonoid is a Plen/mini-Plan/RoboHero robot derivative designed at Zalophus DesignHouse. We love the Plen2 robot but its want to new design. This is our take on a new lower cost version of the Plen2 robot using ES08MA-II/SG90 servo’s.
The 3D printing parts were inspired by the Plen2 components, but they were redrawn from SketchUp to use the inexpensive MG90S servo motors.
Electronic Parts
– 1 x WeMos D1 mini ESP8266 ESP-12
– 1 x PCA9685 16-channel, 12-bit PWM Fm+ I2C-bus Servo controller
– 1 x Robonoid-20CH-R0a Shield
– 1 x HC-SR04 Ultrasonic Distance Measurement Sensor
– 2 x 16340 Battery Holder
– 1 x 2S 7.4V Lithium Battery Charger Protection Board
– 2 x 16340 Batteries
– 1 x DC Jack and Battery Harness Cable
– 20 x ES08MA-II Metal Gear Servo Motors
3D Printing Parts
– Coxa: https://pinshape.com/items/34560
– 3 x Left
– 3 x Right
– Femur: https://pinshape.com/items/34559
– 3 x Left Top
– 3 x Left Bottom
– 3 x Right Top
– 3 x Right Bottom
– Patella: https://pinshape.com/items/34558
– 3 x Left Top
– 3 x Left Bottom
– 3 x Right Top
– 3 x Right Bottom
– Tibia: https://pinshape.com/items/34556
– 3 x Left Top
– 3 x Left Bottom
– 3 x Right Top
– 3 x Right Bottom
– 6 x Tarsus: https://pinshape.com/items/34557
– Shield: https://pinshape.com/items/34561
– 6 x Top
– 6 x Bottom
– 6 x Clip Center
– 12 x Clip Side
– Body: ……………………..Working….
– 1 x Top Plate
– 1 x Bottom Plate
The open source Humanoid Robot – Robonoid hardware and software is free and made with love. Please show your level of support with a voluntary donation.
Donate:
https://www.paypal.com/cgi-bin/webscr?cmd=_s-xclick&hosted_button_id=RDN7ZGAVFS5UE
3D Printed Humanoid Robot – Robonoid – Design concept – 20180619
[20190107] Upload Links
[20181101] Printing
[20180621] Update Design concept
[20180619] Update Design concept
[20180607] Update Design concept
[20180604] Update Design concept
[20180430] Design concept
Humanoid Robot – Robonoid – Design concept – https://youtu.be/n-flpiyNw-M
3D Design Tool: SketchUp Pro
Robonoid is small sized bipedal walking robot The robot has 17 or 19, 24 freely moveable joints and servomotor in order to provide for a range of action and stable movements. Since it’s small in size, Robonoid can balance well and cope with basic movements such as walking and getting up. Also, intricate movements like roller skating and skateboarding are possible.
Robonoid is a wireless controllable robot You can control it by WiFi protocol through your PC and Smartphones. App for android and iOS are an especially intelligible UI. By using it, complicated operations can be controlled more easily.
Robonoid is a friendly robot Robonoid was named indicates a “simply shaped robot” that everyone imagines. Robonoid was designed by pursuing a simple appearance and simple functionality.
Robonoid Lineup
PSY – 135.7mm(W) x 258.39mm(H) x 100mm(D) – 17DOF
Jack – 135.7mm(W) x 305.62mm(H) x – 92,48mm(D) – 22DOF
Gentleman – 135.7mm(W) x 341.22mm(H) x – 78.5mm(D) – 22DOF
Tony – 135.7mm(W) x 265.5mm(H) x – 100mm(D) – 18DOF
SpongwBob – 135.7mm(W) x 230.0mm(H) x 100mm(D) – 16DOF
Hudi – 135.7mm(W) x 251.4mm(H) x 87mm(D) – 19DOF
Gunmo – 135.7mm(W) x 259.3mm(H) x 78.5mm(D) – 19DOF – https://youtu.be/qIZJZDcRpVw
Nova – 135.7mm(W) x 282.8mm(H) x 100mm(D) – 17DOF – https://youtu.be/kzfyKRzp_9I
Hexapod S1 – DOM 352.83mm(WD) x 193.16mm(H) – 20DOF
Robonoid is a Plen/mini-Plan/RoboHero robot derivative designed at Zalophus DesignHouse. We love the Plen2 robot but its want to new design. This is our take on a new lower cost version of the Plen2 robot using MG90S/ES08MA-II/SG90 servo’s.
The 3D printing parts were inspired by the Plen2 components, but they were redrawn from SketchUp to use the inexpensive MG90S servo motors.
Electronic Parts
1 x WeMos D1 mini ESP8266 ESP-12
1 x PCA9685 16-channel, 12-bit PWM Fm+ I2C-bus Servo controller
1 x Shield Robonoid-20CH-R0a
1 x HC-SR04 Ultrasonic Distance Measurement Sensor
2 x 16340 or 18650 Battery Holder
1 x 2S 7.4V Lithium Battery Charger Protection Board
2 x 16340 or 18650 Batteries
2 x Snap-In Single ‘A’-‘AA’ Battery Contacts 209 [KEYSTONE ELECTRONICS CORP.]
2 x Snap-In Single ‘A’-‘AA’ Battery Contacts 228 [KEYSTONE ELECTRONICS CORP.]
1 x DC Jack and Battery Harness Cable
17/19 x MG90S Metal Gear Servo Motors
3D Printing Parts
- Robonoid_BatteryBracket16340.stl ……https://pinshape.com/items/49080
- Robonoid_BatteryHolder18650.stl …..https://pinshape.com/items/49082
- Robonoid_BodyGentleman.stl ……..https://pinshape.com/items/49105
- Robonoid_BodyGunmo.stl …….https://pinshape.com/items/49100
- Robonoid_BodyHudi.stl ……https://pinshape.com/items/49098
- Robonoid_BodyNovaL.stl …….https://pinshape.com/items/49101
- Robonoid_BodySpongeBob.stl ……………”
- Robonoid_BodyNovaS.stl …..https://pinshape.com/items/49103
- Robonoid_BodyTony.stl …….https://pinshape.com/items/49102
- Robonoid_BodyTonyPants.stl ……”
- Robonoid_BodyTonyServoBracket.stl ……”
Robonoid_CapBaseball.stl ……https://pinshape.com/items/49095 - Robonoid_CapHudi.stl ………………..”
Robonoid_eYeLED5.stl ……….https://pinshape.com/items/49106
Robonoid_eYeWS2812.stl …….https://pinshape.com/items/49107
Robonoid_HatBoaterGunmo.stl ……https://pinshape.com/items/49093 - Robonoid_HatConical.stl ……………….”
- Robonoid_HatFes.stl ……………………..”
- Robonoid_HatTC.stl ……………………..”
- Robonoid_HatTop.stl …………………….”
Robonoid_Head.stl ……https://pinshape.com/items/49091
Robonoid_HeadNova.stl …….https://pinshape.com/items/49000
Robonoid_ElbowShoulderRol_Leftl.stl …….https://pinshape.com/items/49071
Robonoid_Foot_Left.stl …….https://pinshape.com/items/49057
Robonoid_FootSlim_Left.stl …….https://pinshape.com/items/49057
Robonoid_FootSimple_Left.stl ……..https://pinshape.com/items/49057
Robonoid_FootRollPitch_Left.stl …….https://pinshape.com/items/49063
Robonoid_Hand_Left.stl ……..https://pinshape.com/items/49070
Robonoid_HandWristShoulderPitchThighYawFoot_Left.stl ….https://pinshape.com/items/49072
Robonoid_Knee_Left.stl ……https://pinshape.com/items/49064
Robonoid_KneePitch_Left.stl ……..https://pinshape.com/items/49067
Robonoid_ShoulderPitch_Left.stl ……..https://pinshape.com/items/49072
Robonoid_ThighPitchHipRollNova_Left.stl ……..https://pinshape.com/items/49068
Robonoid_ThighPitchRoll_Left.stl ……https://pinshape.com/items/49063
Robonoid_Pants.stl …….https://pinshape.com/items/49105
Robonoid_PantsBottom.stl ……………”
WANT TO SUPPORT Zalophus’s DesignHouse?
The open source Humanoid Robot – Robonoid hardware and software is free and made with love. Please show your level of support with a voluntary donation.
Donate: https://www.paypal.com/cgi-bin/webscr?cmd=_s-xclick&hosted_button_id=RDN7ZGAVFS5UE
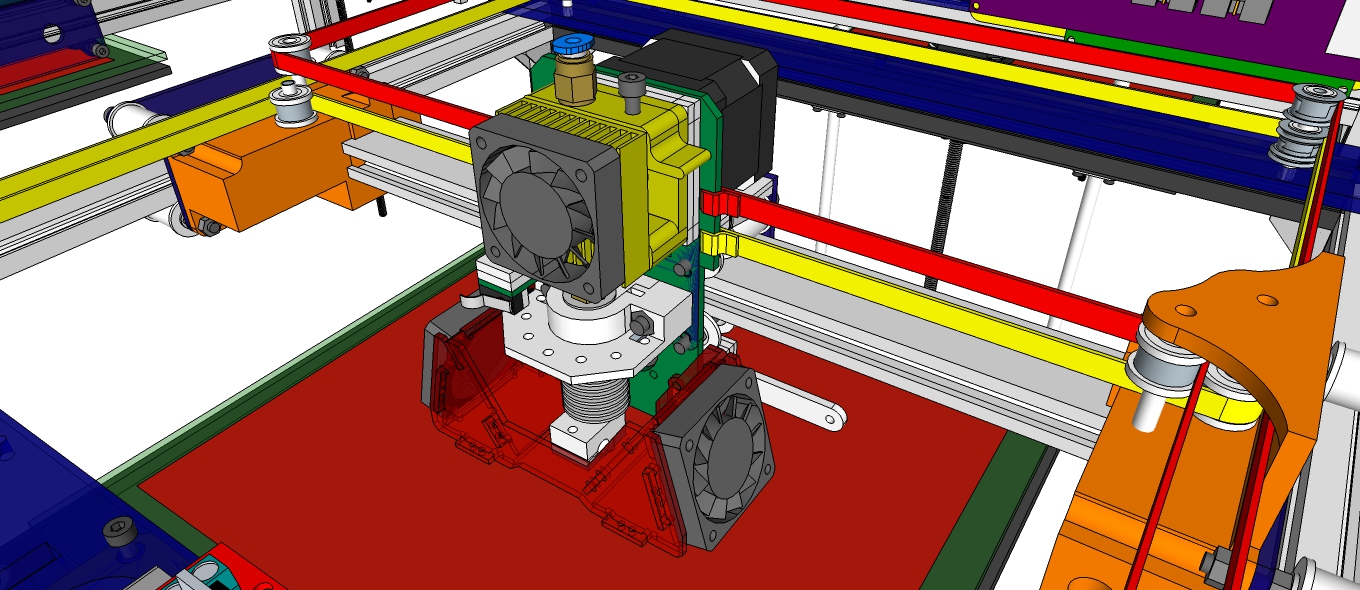
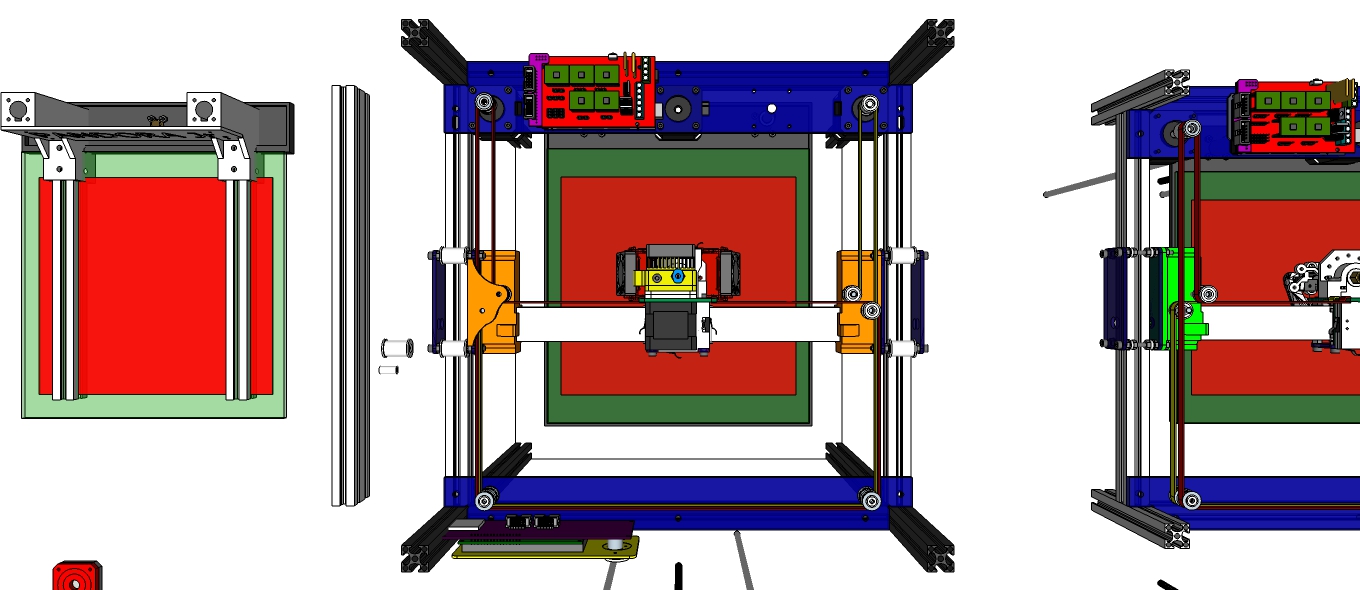
PANDORA Junior DXs – 3D Design Concept
DIY 3D Printer – PANDORA Junior DXs (Design eXtreme single)
3D Design Tool: SketchUp Pro
Technical Specifications
Printing
Technology: FFF(Fused Filament Fabrication) / CoreXY
Build Volume: 223 (W) x 207 (D) x 250 (H) mm – Heatbed
Layer Resolution: 50 ~ 200 microns
Filament: ABS or PLA, Nyron, HIPS, PVA… 1.75 mm diameter
Nozzle Diameter: 0.4 mm (0.2mm, 0.3mm, 0.8mm)
Print File Type: .Code, .STL
Layer Resolutions:
- Fast: 200 micron (0.2 mm)
- Normal: 100 micron (0.1 mm)
- hHigh: 0.06 micron (0.06 mm)
- Ultra High: 0,04 micron (0.04 mm)
Size and Weight
Product Dimensions: 410 (W) x 410 (D) x 485 (H) mm
Product Weight: 11 kg(?)
Software
Software Bundle: Cura, Slic3r, KISSlicer / Octoprint, Printrun, Repetier-Host, MatterControl
Supported File Types: .STL, .OBJ, .AMF, .Gcode
Operating Systems: All (Web-based): Windows, Mac OS, Linux
Firmware
Arduino: Modified Marlin v1.0.2-2
Raspberry Pi: Rasbian, Octoprint, SSH, Samba, VNC, WiringPi
Hardware
Base Plate: Profile DRF 2020, Acrylic
Step Motor: NEMA 17 – Phase: 4, Step Angle: 1.8 Deg/Step, Holding Torque: 2.6Kg.cm
- X/Y/Z/E – 4EA
Cartesian (xyz): X/Y Head: Profile DRF 2020, Z Bed: 10mm Linear Shaft and 8D Screw Rod
Electrical
Control Board: Arduino Mega 2560
Control Shield: Ramps 1.4 Board
Display Board: Reprap Discount Smart Controller LCD 2004
Raspberry Pi: Raspberry Pi 2/3
Camera: Raspberry Camera
Power Requirements: AC 100 – 240 V, 1.4 Amps, 50-60 Hz, 220 W
Connectivity: USB, SD Card, Wi-Fi (Web-based)
Temperature:
- Nozzle temperature: 170 – 270
- Heated bed temperature: 50 – 100
- Operational temperature: 10 – 40
- Storage temperature: 0 – 32
Thanks for watching!……..Coming soon!……..Updating……
Blog:
http://zddh.blogspot.kr/2017/12/pandora-junior-dxs-3d-design-concept.html
The open source PANDORA DXs hardware and software is free and made with love. Please show your level of support with a voluntary donation.
Donate:
https://www.paypal.com/cgi-bin/webscr?cmd=_s-xclick&hosted_button_id=RDN7ZGAVFS5UE
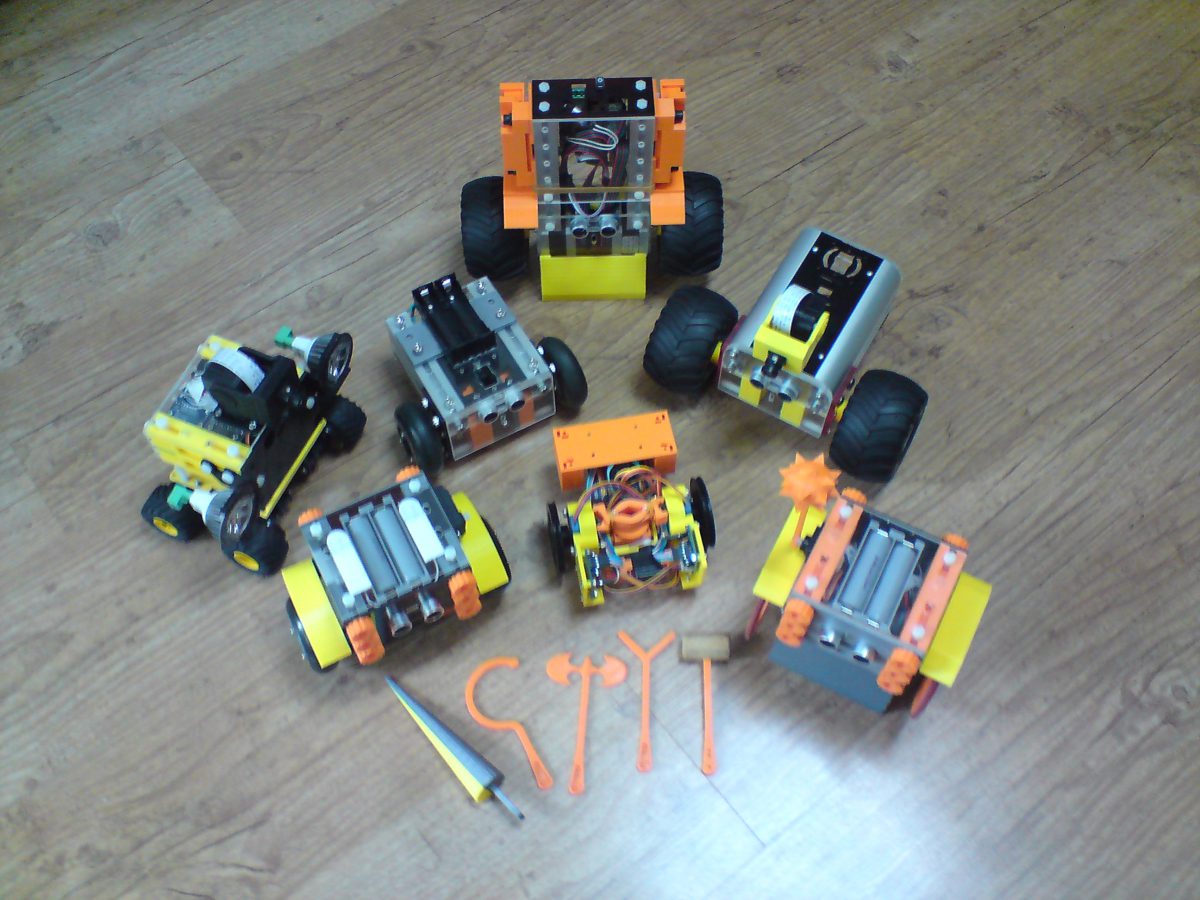
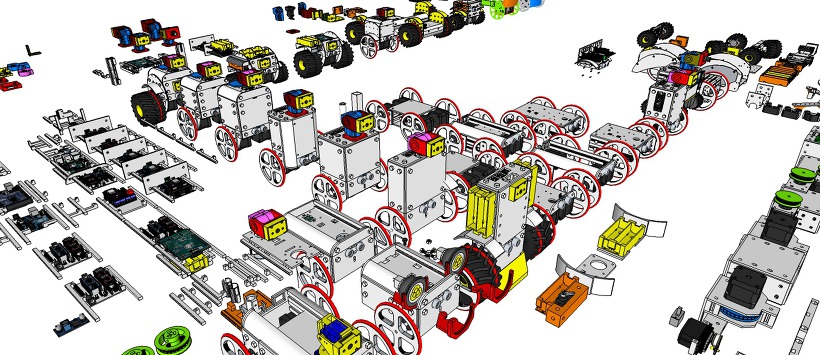
ProfileBlock™ – DIY Robot Platform – Design Concepts
[ Upload design concept 20170418]
ProfileBlock – DIY Robots & Rover & RC & Etc. Platform
3D Design Tool: SketchUp Pro
ProfileBlock’s robots are built on top of an open source Arduino-based(with ESP8266, Raspberry Pi) platform.
-
- drawBot: Drawing Robot (Polargraph, Pen, …
- Rover
Self Balancing Robot (eX-Robot, B-Robot, Roverbot, …
- RC Car
- Drone
- Scara Arm
- Arm Robot
- XY Plot
- 3D Printer
- HomeIoT
- Etc…
Hardware
Base Plate(Parts):
- Profile DF 2020
- Profile DRF 2020
- Acrylic Plate
- 3D Printing Parts
Step Motor:
- NEMA 17 – Phase: 4, Step Angle: 1.8 Deg/Step, Holding Torque: 2.6Kg.cm
- 28BYJ-48
Servo:
- Standard Servo
- SG90 Servo
Electrical
Control Board:
- Arduino
- ESP8266
- Raspberry Pi
Power Requirements:
- 4.2DVC
- 8.4VDC
- 12 VDC
Battery:
- 18650 x 2ea
- 16340 x 2ea
The open source ProfileBlock hardware and software is free and made with love. Please show your level of support with a voluntary donation.
Donate:
https://www.paypal.com/cgi-bin/webscr?cmd=_s-xclick&hosted_button_id=RDN7ZGAVFS5UE
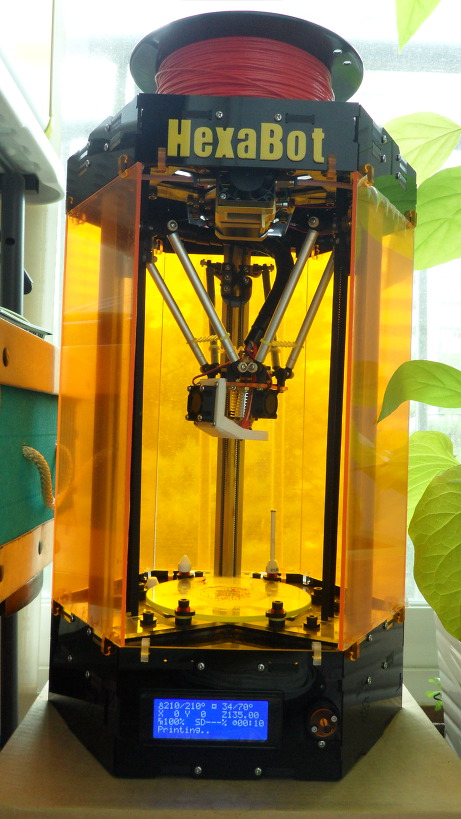
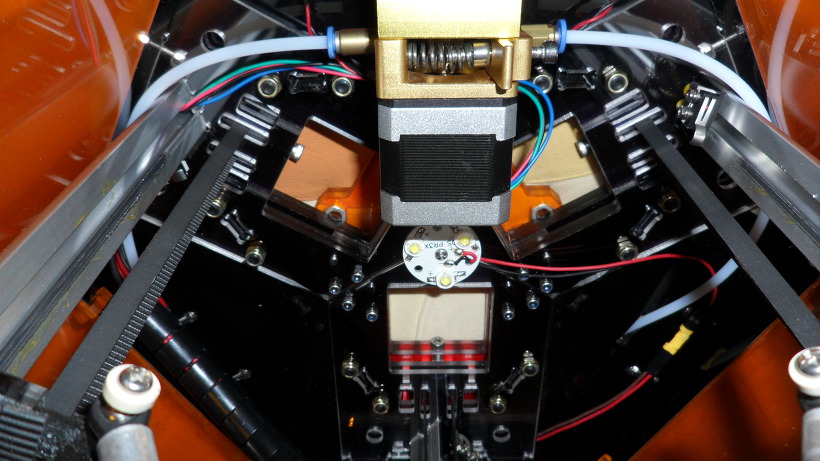
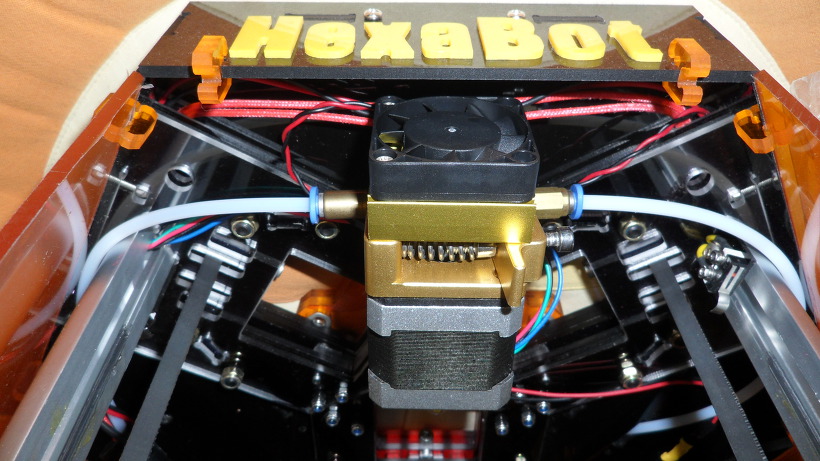
DIY Delta 3D Printer – HexaBot
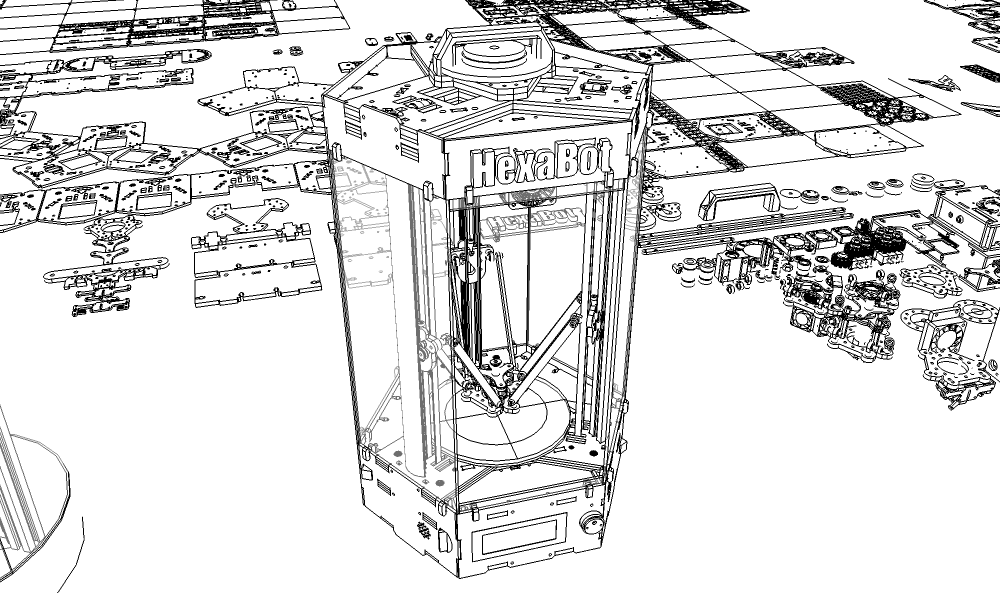
DIY Delta 3D Printer – HexaBot
3D Design Tool: SketchUp Pro
Technical Specifications
Printing
Technology: FFF(Fused Filament Fabrication) / Delta
Build Volume: 95 (W) x 95 (D) x 135 (H) mm
- Auto running Heatbed
Layer Resolution: 50-200 microns
Filament: ABS or PLA, Nyron, HIPS, PVA… 1.75 mm diameter
Nozzle Diameter: 0.4 mm (0.2mm, 0.3mm, 0.8mm)
Print File Type: .Gcode, .STL
Layer Resolutions: - Fast: 200 micron (0.2 mm)
- Normal: 100 micron (0.1 mm)
- hHigh: 0.06 micron (0.06 mm)
- Ultra High: 0,04 micron (0.04 mm)
Size and Weight
Product Dimensions: 260 (W) x 300 (D) x 460 (H) mm
Product Weight: 4.5 kg
Software
Software Bundle: Cura, Slic3r, KISSlicer / Octoprint, Printrun, Repetier-Host, MatterControl
Supported File Types: .STL, .OBJ, .AMF, .Gcode
Operating Systems: All (Web-based): Windows, Mac OS, Linux
Firmware
Arduino: Modified Marlin v1.0.0
Raspberry Pi: Rasbian, Octoprint, SSH, Samba, VNC, WiringPi
Hardware
Base Plate: Profile DRF 2020, Acrylic
Step Motor: NEMA 17 – Phase: 4, Step Angle: 1.8 Deg/Step, Holding Torque: 2.6Kg.cm
- X/Y/Z/E – 4EA
Cartesian (xyz): X/Y Head: LM Guide, Z Bed: 10mm Linear Shaft and 8D Screw Rod
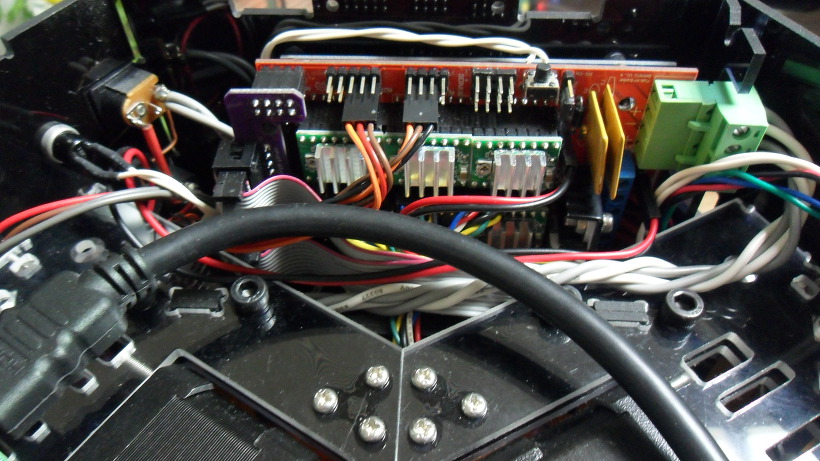
Electrical
Control Board: Arduino Mega 2560
Control Shield: Ramps 1.4 Board
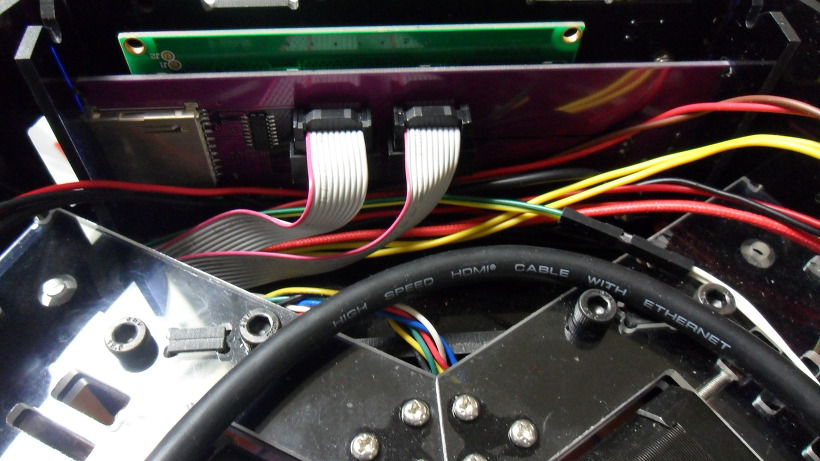
Display Board: Reprap Discount Smart Controller LCD 2004
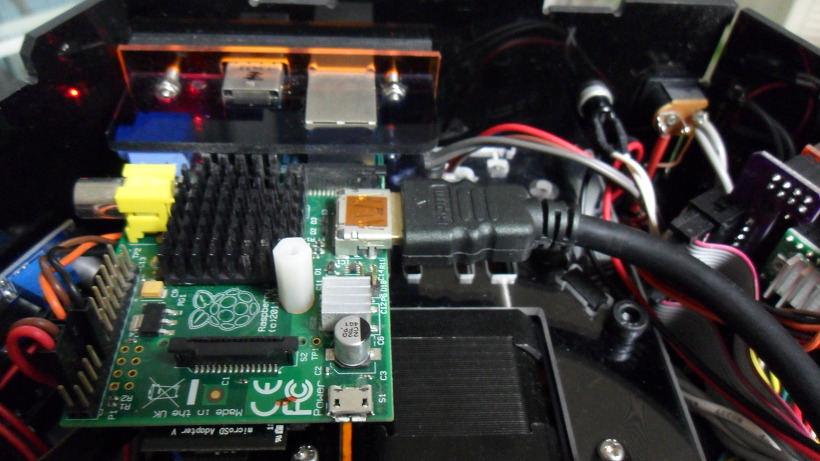
Raspberry Pi: Raspberry Pi B
Power Requirements: AC 100 – 240 V, 50-60 Hz, 12 VDC, 4.5A, 54 W
Connectivity: USB, SD Card, Wi-Fi (Web-based)
Temperature: - Nozzle temperature: 170 – 270
- Heated bed temperature: 50 – 100
- Operational temperature: 10 – 40
- Storage temperature: 0 – 32
https://www.thingiverse.com/thing:917729
Thanks for watching!…….coming soon!……Updating……
The open source HexaBot hardware and software is free and made with love. Please show your level of support with a voluntary donation.
Donate:
https://www.paypal.com/cgi-bin/webscr?cmd=_s-xclick&hosted_button_id=RDN7ZGAVFS5UE