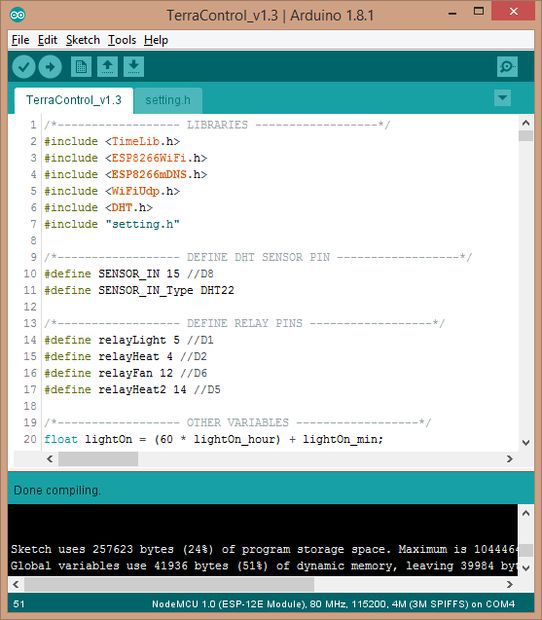
I’m working on making the code as user friendly as possible but it’s going to be a long run. I’d like to have separate html and css files but I’m still figuring it out. For now, few changes…:
! ! ! included mDNS protocol, so from now on you don’t need IP address to connect to your NodeMCU, simply put terracontrol.local in your browser and you are done (you have to be on the same network, of course)
separate file for setting up the variables (setting.h). Unzip the file to your Projects folder, when you open the *.ino file, setting.h should be opened as well.
UPDATE 2: Version 1.2
improved graph displaying range
new values in graphs are moved to the end of array, not starting from the beginning again
improved light setting – it is now unlimited (ON time can now be later than OFF time)
code for manual defining your own server is in one place and commented by default (i.e. it is on automatic setting)
clearer information in serial monitor
unified function for min/max values in array
new function for printing out minute values
UPDATE 1: Please see the version 1.1 I got the graphs and statistics working! Well, sort of…the range is still not as I want it to be, but at least now it is correctly displaying min and max. Plus new mouseover feature for the individual values in the graph.
After my first attempt to create controlled terrarium using Arduino board I got my hands on NodeMCU 12E board and I knew it was going to be a big step up!
I took me a few days before I began to understand how this board works (thanks to a lot of instructables here and google of course) and the possibilities it had. It think I’m on the right path to create exactly what I was dreaming about for several years…
So what is TerraControl v1.2 capable of?
2 automatically controlled relays (light timer and heating)
2 manually controlled relays (fan, second heating)
GMT time change
Simple graphs with highest/lowest temperature/humidity over the last 24 hours
Monitoring temperature and humidity in terrarium
All accessible and adjustable through webserver using HTML and CSS
given the nature of NodeMCU board (its output is only 3.3v) you will either have to buy 3.3V relay board, or modify 5v board, or buy I2C logic converter module – for example – $0.9
5V source (I’m using older usb charger)
wires
solder
case/box
Arduino IDE
Step 1: Getting the Parts Together
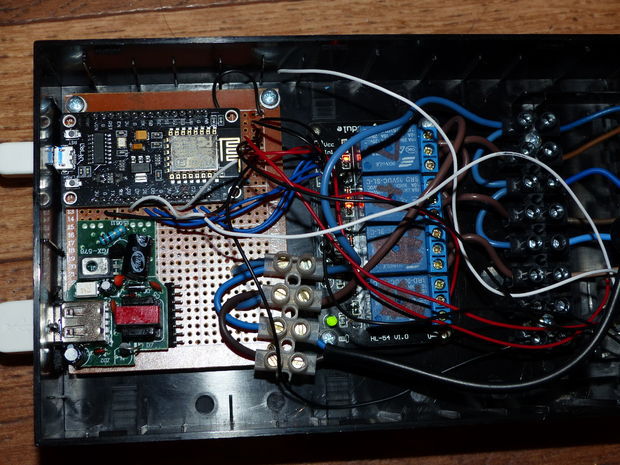
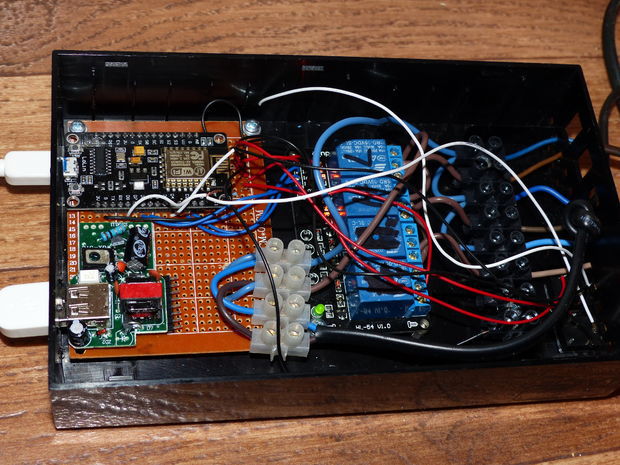
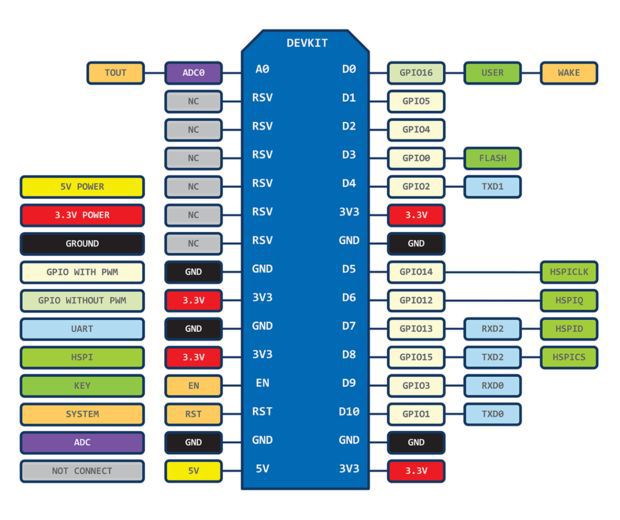
Connecting these parts is easy, just look at the source code and keep in mind that GPIO’s of the NodeMCU board is different from the actual boards description (as seen on the trird picture):
i.e. DHT sensor pin goes to D8 (board’s D3, D4, D8 can’t be used as output but can be used as input), and the relay pins accordingly to the code. Remember, if you are using 5V relay, you need to modify the relay board or use I2C logic converter.
! ! ! IMPORTANT! When uploading the code to the board, you have to disconnect the DHT sensor, otherwise you will get an error when attempting to upload ! ! !
All parts can be powered with 5v power adapter
Step 2: Setup and Customization
Before we upload the code, there are few things that needs to be set up in setting.h:
//You WiFi AP
const char ssid[] = “SSID Name”; // insert your WiFi AP name
const char pass[] = “password”; // insert your WiFi password
// T E R R A R I U M S E T T I N G
float tempMin = 24; // temperature in Celsius for switching the heating ON
float tempMax = 30; // temperature in Celsius for switching the heating OFF
int humMin = 50; // minimum humidity in %
int humMax = 70; // maximum humidity in %
// hour and minute for light to go ON
int lightOn_hour = 7;
int lightOn_min = 0;
// hour and minute for light to go OFF
int lightOff_hour = 20;
int lightOff_min = 30;
// Central European Time (1 for winter time)
int timeZone = 2;
Uncomment the following part of the code if you know how to define your server manually or just run the code and get addresses from the serial monitor.
/*— UNCOMMENT THIS FOR MANUAL SETTING —
IPAddress ip(192, 168, 0, 111); //Node static IP
IPAddress gateway(192, 168, 0, 1);
IPAddress subnet(255, 255, 255, 0);
WiFi.config(ip, gateway, subnet);
*/
One thing I wanted was the relay board to be used as little as possible. As you probably know, relays have two possible ways of connection: ON when not used and ON when used. So I connected the light and heating to “ON when not used” (heating is almost always ON and lights are ON for about 13-14 hours every day) and fan and heating 2 to “ON when used” (I barely need to use one of them).
That is why the code for the same function is using different values:
You can of course modify the code according to your needs.
Now just connect the DHT sensor and let’s look at the result!
Step 4: Webserver
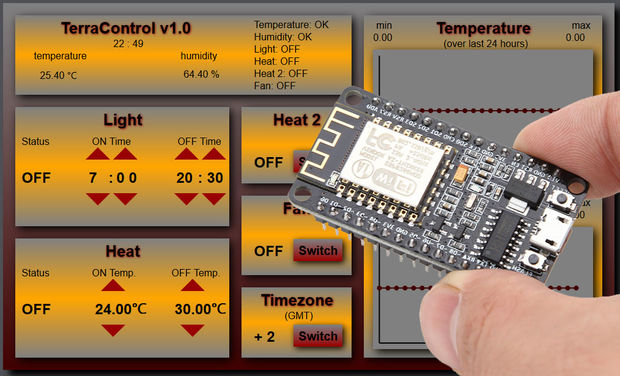
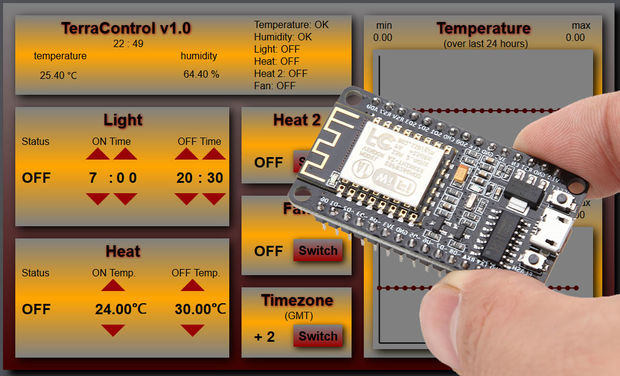
When you open the webserver you will see simple page with all information about your terrarium and some features:
Light ON/OFF time can be adjusted (step are: 1 hour for hour setting and 5 min for minute setting). At the moment ON time has to be earlier that OFF time (ON 22:30 and OFF 0:30 will not work – yet) – fixed in version 1.2
Temperature setting (steps are 0.5 degree Celsius)
Manualy turn ON/OFF other two relays – Fan and Heat 2 and adjust timezone when the time changes
if needed, change your timezones in following part of the code:
I know that the HTML and CSS code could be much more simple and the coding is not really user friendly but for the moment it works as it is supposed to (only the graphs are not very accurate but I’m still working on them) and I will get to these points when I start working on version number two. I have already decided to use external power supply (in this version I just stripped the 5v adapter and soldered it inside the box) and I also want the power cables to be more accessible and easier to connect/disconnect. I hope you guys (and your pets) will appreciate this instructable, if you do, please leave a short comment. And of course, suggestions are more than welcome! Thank you
내가 아두 이노와 임베디드 시스템 땜질 시작 이후로, 나는 자기 밸런싱, 세그웨이 같은 로봇을 구축하는 방법에 대해 매우 흥분했습니다. 인터넷의 주위에 유사한 프로젝트 및 리소스는 매우 풍부하다.
첫 번째 프로토 타입은 플라스틱 도시락 상자 안에 지어졌습니다. 그것은 아두 이노 나노 사용 원격 제어를 적외선. 그것은 사용 MPU6050 로봇의 방향을 검출하기위한 관성 측정 유닛. 균형은 매우 잘 작동하지만, 적외선 원격 제어는 매우 비실용적이고 신뢰할 수 있었다.
내가 대해 알게되었을 때이 프로젝트는 부활 ESP8266 , 매우 강력한 코어의 저렴한, 와이파이 활성화 마이크로 컨트롤러. 웹 개발에 대한 배경을 갖는, 와이파이 연결이 나에게 가능성의 세계처럼 보였다.
전통적 아두 이노 커뮤니티 원격 제어 로봇은 블루투스 통신을 이용하여 구현되어왔다. 그러나, 이것은 실질적으로 컨트롤러 소프트웨어를 각 플랫폼에 개별적으로 구현되어야한다는 것을 의미한다 (안드로이드, 아이폰 OS, PC 등)
HTML과 자바 스크립트로 구현 웹 애플리케이션은 점점 더 인기를 끌고있다. 이유 중 하나는 휴대 성이다. 웹 응용 프로그램을 한 번 작성되면, 그것은 충분히 좋은 웹 브라우저가있는 모든 플랫폼에서 실행할 수 있습니다.
ESP8266은 WiFi 액세스 포인트로 구성 될 수있다. 하나는 웹 응용 프로그램 서비스를 제공하기 ESP8266이 가능하고, 정적 페이지를 제공하는 HTTP 서버를 설정할 수 있습니다. 로봇 제어 소프트웨어는 웹 응용 프로그램으로 구현 된 경우 이제 상상! 그건 내 프로젝트 ESPway 뒤에 키 생각이다.
이 작은 로봇에 대한 코드와 회로도를 찾을 수 있습니다 GitHub의에 . 구축 개발 및 소프트웨어 사용에 대한 사전 설명이 있습니다. 또한이 사용자 설명서의 어떤 종류를 짓고 있어요. 이 프로젝트는 또한 한 레딧에 논의 나는 비디오를 게시 할 때 얼마 전에.
안전 제일
깊은 기술적 인 세부 사항에 다이빙하기 전에, 그래도 난 당신이 스스로를 구축하려고하는 경우 안전에 대해 경고한다.
전자 및 소프트웨어는이 글을 쓰는 현재의 (저전압 차단 제외) 안전 기능이 포함되어 있지 않습니다. ESP8266의 펌웨어 (이것은 아마도 수 / 노점을 충돌하는 경우 것 일), 회전에서 모터를 중지 아무것도 없다. 이 로봇은 작은 및 그 주변을 손상하지 충분히 빛이 내 경우에는 특별한 문제가되지 않습니다. 그러나,이 로봇의 크고 무거운 버전을 제작하기 전에 안전을 고려하시기 바랍니다. 하나는 아마도 소프트웨어 오류의 경우에 모터를 차단 할 몇 가지 안전 장치 시스템을 구현할 수 있습니다.
전자 및 기계
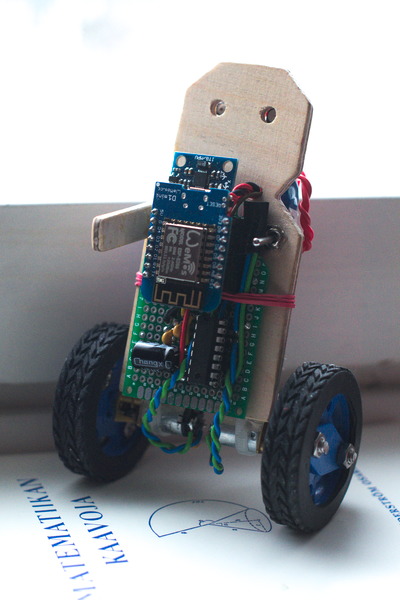
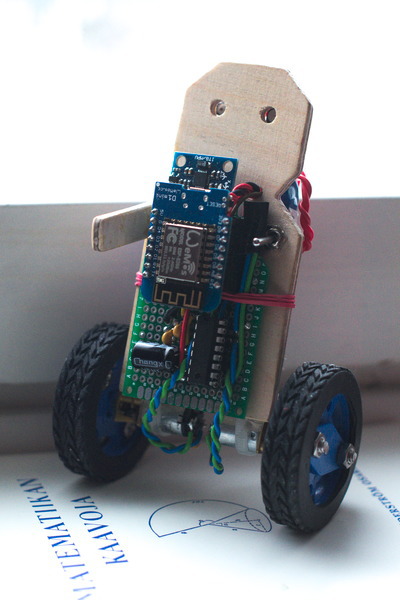
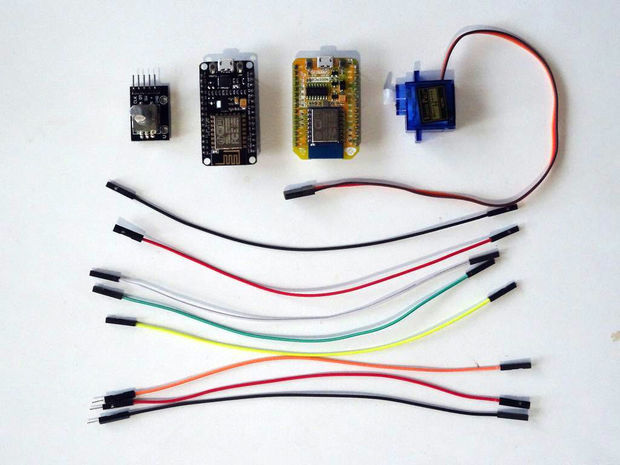
이 로봇 부품의 대부분은 이베이 나 AliExpress에서 공급된다. 전체 회로도는 GitHub의에서 찾을 수 있습니다. 이 프로젝트의 목표 중 하나는 가능한 한 간단하고 저렴한 전자를 유지했다.
로봇의 핵심은 ESP8266 마이크로 컨트롤러가있다. 그것은 독립 구성 요소로 사용되지하지만 거기 WEMOS D1 미니보드. 그것은 USB 커넥터와 펌웨어를 업로드하기위한 USB-에-UART 컨버터를 가지고있다.
MPU6050는 방위 센서로서 사용된다. 그것은 I2C를 통해 통신, 사용 가능한 저렴한 브레이크 아웃 보드의 많음이있다. 나는 GY-521라는 하나를 데 사용합니다.
모터는 통합 금속 기어 박스와 평범한 오래된 DC 모터입니다. 공칭 회전 속도는 300 rpm으로, 그리고 그들은 6V에 대한 평가된다. 하나는 “N20의 300RPM”또는 “12ga의 300RPM”를 검색하여 이러한 모터를 찾을 수 있습니다.
모터가 구동되어 L293D 듀얼 H 브리지 모터 드라이버 IC. 그 로봇을 구축 할 때 내가 손에 가지고 무엇 때문에이 IC는 주로 선택되었다. 바이폴라 트랜지스터의 출력은 다리를 건너 큰 전압 강하를 생산 이제 나는 배웠다. 결국 내가 가진 드라이버 교체 할 수 있습니다 DRV8833 MOSFET 출력을 가지고있다.
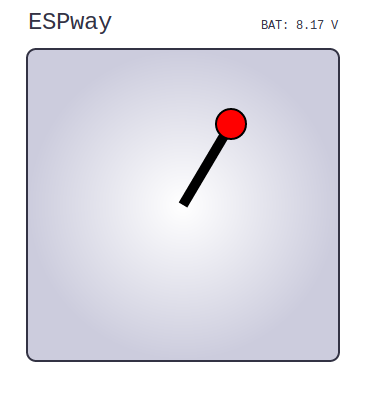
나는 로봇에 전력을 공급하기 위해 2 셀 리튬 폴리머 배터리를 사용하고 있습니다. 완전히 충전 된 때 ~ 8.4 볼트를 제공합니다. 전지 전압은 ESP8266의 아날로그 입력을 통해 모니터되고, 배터리 전압이 소정의 임계 값 아래로 떨어질 때, 모터를 차단하는 선택적인 특징이있다. 즉 리튬 폴리머 배터리를 사용하는 것이 일반적이다. 아날로그 입력 범위는 0-1 볼트이다. 3.3 다음 D1 미니 보드, 이미 1의 비율로 분압기있다. 따라서 I은 아날로그 입력 범위에 적합하도록 배터리 전압 스케일링 1:10 비율로 수정 한 저항을 추가했다.
마지막으로,이 WS2812B의 NeoPixels은 로봇의 “눈”으로 추가됩니다. 그들은 (OTA 업데이트 등을 진행있을 경우이 떨어진 경우) 로봇의 현재 상태를보고 매우 유용 증명
크기와 무게의 최적화를 설계 목표로 설정 한 것을 다른 역학에 대해 말을 많이가 아니다. 프로토 타입 몸은 4mm 합판의 일부 조각의 내장 및 에폭시와 함께 붙어있다.
로봇의 일반보기
소프트웨어 플랫폼
현재 자원과 ESP8266에 소프트웨어를 개발하기위한 지원의 재산이있다. 제조업체 Espressif하는 RTOS없이 운영 체제와 다른 하나 하나가 제공하는 두 개의 SDK가 있습니다. 도있다 아두 이노 코어 의 심바 크로스 플랫폼 RTOS 프레임 워크와 MicroPython은 . 새로운 언어와 프레임 워크가 큰 인 지금 가끔씩 튀어 나올 것 같다!
이 로봇에 대한 몇 가지 프로토 타입을 사용하여 아두 이노 코어에서 수행 된 PlatformIO를 빌드 시스템으로. 프로토 타입 작업은에서 찾을 수 있습니다 해당 지점 GitHub의의 REPO의.
그러나 최대의 유연성과 제어를 위해, 나는 제조업체의 “비 OS”SDK로 전환. 하나는이 마이크로 컨트롤러와 함께 얻을 수있는 즉 약으로 기본입니다. 나는 특히,이 SDK에 사용할 멋진 도서관이 있었다 찾을 수 기쁘게 생각 libesphttpd 간단한 HTTP 서버와 파일 시스템을 구현한다. 그것은 또한 웹 소켓 통신 시설을 갖추고으로이 프로젝트를위한 안성맞춤이었다.
모바일 웹 UI
로봇에 전원을 공급하고, WiFi 액세스 포인트에 클라이언트 장치를 연결 한 후, 하나는 기본 IP 주소에서 웹 브라우저 사용자 인터페이스를 열 수 있습니다 192.168.4.1.
나는 가능한 한 간단하게 UI를 유지하기 위해 노력했다. 그것은 본질적으로 HTML5 캔버스에 그려진 가상 “조이스틱”로 구성되어 있습니다. 터치 디바이스에서 휴대 전화 등, 꽤 직관적 인 느낌.
조정에 사용되는 사용자 인터페이스.
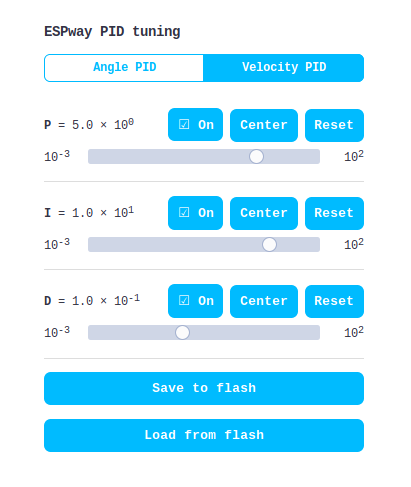
의 URL에서 로봇의 PID 매개 변수의 온라인 튜닝을위한 UI도 있습니다 /pid. 그것은 진행중인 작품이지만, 반 사용 가능한 상태에서 이미. 그것은 본질적으로 펌웨어를 매개 변수가 변경 될 때마다 다시 깜박하지 않고 한 번에 로봇을 조정 할 수 있습니다. 하나는 UI를 통해 플래시 메모리에 조정 매개 변수를 저장할 수 있습니다.
초기 PID 튜닝 사용자 인터페이스를 제공합니다.
웹 소켓을 통해 대기 시간이 짧은 통신
아마이 프로젝트의 가장 흥미로운 부분은 낮은 지연 시간 원격 제어를 달성하는 방법이다.
전통적으로 사람들은 ESP8266에 HTTP API가 어떤 종류의를 구현하고있다. 그것은 각 명령에 대해 별도의 URL가 있다는 것을 의미한다. 예는 로봇 차, 같은 URL이있을 것 /forward, /backward, /stop, /turn-left, /turn-right등 다음 만들 것 클라이언트 응용 프로그램 AJAX의 로봇을 제어하는 요청을. 그러나, TCP 연결을 열고 모든 명령에 구문 분석 HTTP 헤더가있을 것입니다 의미합니다. 즉, 불필요한 오버 헤드 및 지연을 도입한다. 이 컨트롤은 그런 식으로 매우 부드러운 없을 것이다.
더 나은 대안은 열려있는 TCP 소켓을 유지하고 두 방향으로 그것을 통해 정보를 전송하는 것입니다. ESP8266 원시 TCP 통신을위한 일류 지원을하고 있지만, 자바 스크립트 하나는 원시 TCP 소켓을 열 수 없습니다. 대신있다 WebSockets를 정의 된 핸드 쉐이킹 프로토콜 및 데이터 프레임 포맷 첨가 TCP 소켓이다. 때문에 libesphttpd웹 소켓 구현을 가지고, 나는이 세부 사항에 대해 걱정하지 않았지만, 단지 데이터 패킷을 교환한다.
데이터 패킷의 첫 번째 바이트에 해당되는 명령을 표시하고, 이후의 추가 바이트 데이터이다 : 거기 로봇와 UI 사이에 통신하는 매우 단순한 프로토콜이다. 부가 데이터의 길이는 각각의 명령에 대한 알려진 고정된다. 예를 들어, 클라이언트에 의해 전송 된 “스티어링”데이터 패킷은 3 바이트로 구성 첫 번째 바이트 (즉, 같은 코드로 정의되어 제로 STEERING). 두번째 바이트는 원하는 속도를 나타내고, 세 번째는 회전 속도를 나타내는 (네거티브 = 좌, 포지티브 = 우측). 이 경우, 두 번째 및 세 번째 바이트는 8 비트 부호있는 정수로 해석된다. 데이터 바이트의 해석은 문제의 명령에 따라 달라집니다.
부드러운 양방향 통신을 감안할 때, 하나는 멋진 모든 종류의 것들을 구현할 수 있습니다. 예를 들어, 로봇은 클라이언트 웹 응용 프로그램에서 배터리 모니터링을 허용, 연결된 모든 클라이언트에 현재 배터리 독서를 보낼 수 있습니다. 또한, 가장 실용적인 것들 중 하나는 PID 컨트롤러 매개 변수의 온라인 튜닝이다.
데이터 바이트의 C 코드, 조작 및 천연 재 해석된다. 자바 스크립트에서는, 이진 데이터는로 표현되는 ArrayBuffer원시 이진 데이터의 블록의 표현은 본질적이다. 액세스 및 수정하려면, 하나는 사용할 수 있습니다 DataView기본 바이너리 버퍼에 바이트 수준의 액세스를 제공한다. 하나는 예를 들어 “바이트의 16 비트 부호없는 정수 (리틀 엔디안)로 13 쓰기 버퍼의 처음부터 오프셋 2″라고 할 수있다. 나는 자바 스크립트 API를 제공 낮은 수준의 제어가 찾을 수 놀랐다.
고정 소수점 센서 퓨전
I2C를 통해 MPU6050와 통신하는 것은 쉽다. 하나는 1 kHz에서 업데이트되는 세 축의 가속도와 자이로 측정치를 포함하는 하드웨어 레지스터를 판독 할 수있다. 배향으로이 값을 변환하는 과정은 “센서 퓨전”라고한다. 거기를 수행하는데 사용될 수 센서 자체로 신호 처리 코어이고,이 우수한 I2Cdevlib것을 구현한다. 그러나, 내가하고 싶지 않은 무언가 센서에 바이너리 펌웨어 덩어리를 업로드해야합니다. 또한, 그 알고리즘은 미가공 데이터는 1 kHz에서 사용할 경우에도 200 Hz의 샘플링 레이트만을 할 수있다.
주어진 ESP8266가 가진 32 비트 코어를 가지고 16 * 16 -> 32 비트 곱셈 확대, I 센서 융합하는 대신에 구현 될 수 있다고 생각. 가장 특히, 선택할 수있는 많은 알고리즘이 있습니다 보완 필터 , 칼만 필터 와 Madgwick 필터 . 후자는 독창적으로 작동 최첨단 신규 알고리즘 쿼터니온 방향의 표현. 또한이 시작하는 데 사용할 수 몇 가지 예제 코드이었다, 그래서 Madgwick 알고리즘이 선택되었다.
ESP8266는 부동 소수점 유닛이 골대를 벗어났습니다하고, 부동 소수점 연산은 소프트웨어로 구현해야합니다. 즉, 복잡한 비즈니스 컴파일러 지원 라이브러리에서 수행되었지만, 그것은 아주 느리다. 따라서, 나는 완전히 알고리즘의 부동 소수점 숫자의 사용을 방지하기 위해 원했다. 따라서 나는 Q16.16에 샘플 코드를 번역하기로 결정했습니다 고정 소수점 숫자 표현을 . 고정 점은 우리가 기본적으로 정수를 위해 노력하고 있지만, 16 최하위 바이트가 소수 부분으로 촬영 한 것을 의미한다.
구현에 대한 하나 개의 좋은 실용적인 세부 다음 Madgwick 알고리즘에, 하나는 어떤 경우에 벡터와 사원 수를 정상화해야한다. 이 경우 정규화는 제곱근으로 나눈 것을 의미한다. ESP8266의 핵심은 하드웨어 부문을 가지고 있지 않기 때문에이 소프트웨어에서 구현 될 필요가 있습니다. 동일은 제곱근에 적용됩니다. 우리는 어떻게 든 그것을 피할 수있는 경우에 따라서는 개별적으로 두 작업을 수행하는 것이 훨씬 이해가되지 않습니다. 반면에, 곱셈 연산의 측면에서 상대적으로 저렴합니다. 제곱근 나누면 제곱근의 역수를 곱한 것과 같다. 즉 여기에서 이루어졌다 무슨 – 상호 제곱근 함수의 라인을 따라 구현 이 StackOverflow의 대답 .
캐스케이드 PID 제어
어떻게 로봇이 실제로 균형을 유지합니까? 지금까지 우리는 로봇의 방향의 좋은 평가가 있습니다. 어떻게 든 적합한 모터 출력 신호로 변환되어야한다.
대답 할 두 가지 질문이 있습니다 :
로봇의 기울기 각도는 균형을 유지하기 위해 무엇을해야 하는가?
어떤 모터 출력 전력은 소정 경사각을 달성해야 하는가?
캐스 캐 이드 :이 자연스럽게 종종 자기 밸런싱 로봇에 구현 된 제어 전략에 이르게 PID 컨트롤러 . PID 제어에 대한 소개, 나는 기사 추천 박사 학위없이 PID를 팀 웨스콧에 의해. 본질적으로, 제 제어부는 입력으로서 원하는 속도를 취득하는 속도를 달성하기 위해 경사 각도를 제어한다. 바람직한 경사각은 그 각도를 달성하기 위해 모터 출력을 조정하는 제 제어기에 공급된다.
물론, 상기 제 2 제어부는 MPU6050 관성 측정 유닛을 통해 피드백을 얻는다. 한편, 현재 속도의 피드백을 얻는 것은 사소한 일이 아니다. 하나는 모터 샤프트에 회전 인코더를 설치하여 그것을 달성 할 수있다. 비용을 최소화하고 회로를 단순화하기 위해, 나는 그것을 밖으로 떠났다. 대신에, 내 코드에 사용되는 조 근사있다 : 속도 피드백이 단기 변동을 취소하기 위해 평활화 모터 구동 신호로부터 취해진 다. 이 사실은 놀라 울 정도로 잘 작동합니다!
또한, 단순한 형태의 게인 스케줄링은 로봇이 낙하하려고하는 상황에서 사용된다. 높은 비례 이득 PID 계수들의 상이한 세트는 다시 안정성을 달성하기 위해로드된다. 아래의 비디오 (일부 fallovers와 함께) 당신은 행동에서 볼 수 있습니다.
여기에 설명 된 제어 방식은 자기 밸런싱 로봇을 구현하는 유일한 방법은 아니다. 참고 이 문서 로봇의 동적 모델을 기반으로 제어 방식과 비교합니다.
소프트웨어 드라이버
마지막으로을의이 ESP8266 프로그래밍의 일부 실용성을 논의하자.
이 마이크로 컨트롤러에 하나의 문제는 하드웨어 주변의 부족이다. 특히, 칩상의 I2C 또는 PWM 어떠한 하드웨어 구현은 없다. 그들은 소프트웨어로 구현되어야한다. 문제는 매우 동일한 프로세서 코어 끊임없이 무선 통신을 처리하는 것으로한다. 그래서, 다른 소프트웨어 루틴은 와이파이 인터럽트에 의해 중단 얻을 수 있습니다. I2C 및 PWM 모두 타이밍에 대한 중요하기 때문에 그것은 약간의 문제입니다.
PWM 및 I2C의 소프트웨어 구현은 Espressif SDK와 함께 번들로 제공됩니다. 그러나 글을 쓰는, 그들은 어떤 식 으로든하거나 비효율적에 결함이 있습니다. 다행히, 지역 사회에서 어떤 똑똑한 사람들은 자신의 드라이버를 출시했다. I 사용하여 결국 ESP8266_new_pwm정확한 타이밍 안정된 PWM 신호를 실현할 NMI 인터럽트를 사용 스테판 브루엔스 의해. 모터는 2 kHz에서 PWM으로 공급된다.
I2C를 들어,라는 빠른 조립 구현 brzo_i2c파스칼 커턴스키으로 사용 하였다. 나는 I2C 거래 중에 완전히 비활성화 인터럽트 때문에 처음에는 I2C 드라이버에 약간의 문제가 있었다. 이는 결국 일부 WiFi를 발사 할 수없는 방해 아마도에, 펌웨어 충돌로했다. 즉, 쉽게 인터럽트를 비활성화 명령을 주석에 의해 수정되었습니다. 즉, I2C 타이밍을 타협하지만, 실제로는 모든 것이 매우 잘 작동하고있다.
피드백
이 문서에서 설명하는 무언가의 더 정교한 설명을 좋아하거나 해결하기 위해 발견 뭔가를했을 경우,이 사이트에 문제를 제기하십시오 GitHub의의의 repo . 당신은 또한에 연락처 찾을 수 있습니다 이 페이지를 . 모든 의견은 매우 환영하고 감사합니다.
ESP8266 modules are great low cost stand alone controllers with built in Wi-Fi. In this Instructable I will show you how you can control a Servo remotely over Wi-Fi with a Rotary Encoder. The Instructable is a similar but more advanced version of the “Arduino Nano and Visuino: Control Servo with Rotary Encoder” Instructable.
In the Instructable, I will use 2 NodeMCUmodules. One version 0.9, and the other 1.0. The NodeMCU are the easiest way to program and experiment with ESP8266controllers. This Instructable however can easily be done with other modules, and the Servo module can even use ESP-01 module as it needs only one GPIO pin to connect to the Servo.
Step 1: Components
2 NodeMCU ESP8266 boards (I used both NodeMCU 0.9, and NodeMCU 1.0 versions, but any other combination, or even stand alone ESP-12 will work)
Step 2: Connect the Rotary Encouder to the first NodeMCU ESP8266 Module
Connect Ground(Black wire), Power(Red wire), Direction(Green wire), Clock(Yellow wire), and Switch wire(White wire) to the Rotary EncoderModule (Picture 1)
Connect the other end of the Ground wire(Black wire) to Ground pin of the ESP8266 NodeMCU module(Picture 2)
Connect the other end of the Power wire(Red wire) to the 3.3V power pin of the ESP8266 NodeMCU module(Picture 2)
Connect the Clock wire(Yellow wire) to Digital pin 2 of the ESP8266 NodeMCU module(Picture 3)
Connect the Direction wire(Green wire) to Digital pin 3 of the ESP8266 NodeMCU module(Picture 3)
Connect the Switch wire(White wire) to Digital pin 4 of the ESP8266 NodeMCU module(Picture 3)
Picture 4 shows where are the Ground, 3.3V Power, Digital 2, Digital 3, and Digital 4 pins of the NodeMCU 1.0
Step 3: Connect the Servo to the second NodeMCU ESP8266 Module
To simplify this Instructable, we will connect the Power from the NodeMCU to the Servo, In real projects, you will need to have a dedicated power supply for the servo! Please look at this Instructable to see how you can connect the Servo to external power.
Connect Ground(Black wire),Power(Red wire), and Control(Orange wire) to the Servo (Picture 1)
Connect the other end of the Power wire(Red wire) to the 5V(Called “Vin” in NodeMCU version 1.0) Power pin of the ESP8266 NodeMCU module (Picture 2)
Connect the other end of the Ground wire(Black wire) to the Ground pin of the ESP8266 NodeMCU module (Picture 2)
Connect the other end of the Control wire(Orange wire) to the Digital pin 2of the ESP8266 NodeMCU module (Picture 3)
Picture 4 shows where are the Ground, 5V(Vin) Power, and Digital 2 pins of the NodeMCU 0.9
Step 4: Start Visuino, and select the ESP8266 Board type
To start programming the Arduino, you will need to have the Arduino IDEinstalled from here: http://www.arduino.cc.
Make sure that you install 1.6.7 or higher, otherwise this Instructable will not work!
Click on the “Tools” button on the Arduino component (Picture 1) in Visuino
When the dialog appears, select “NodeMCU ESP-12” as shown on Picture 2
Step 5: In Visuino: Setup the module as Access Point
In the Object Inspector, expand the “Modules” property, then the “WiFi” sub property, then the “AccessPoint: sub property (Picture 1)
Set the value of the “SSID” sub property of the “AccessPoint”, to “ServoRemote” (Picture 1)
To make sure the Access Point will be on the 200.200.200.X subnet, we need to assign a fixed address.
In the Object Inspector, expand the “Config” sub property of the “AccessPoint” property (Picture 2)
Set the value of the “Enabled” sub property of the Config to “True” (Picture 2)
Set the value of the “IP” sub property to “200.200.200.100” (Picture 3)
Step 6: In Visuino: Add an UDP Socket for the communication
Next we need to add an UDP socket for the communication.
In the Object Inspector, click on the “…” button next to the value of the “Sockets” sub property of the “WiFi” property (Picture 1)
In the Sockets editor select “UDP Socket”, and then click on the “+” button (Picture 2)
In the Object Inspector, set the value “RemoteIPAddress” property to “200.200.200.200” (Picture 3) – this is the fixed IP address that we will assign to the other module later on
In the Object Inspector set the value of the “RemotePort” to “8888” (Picture 4)
Close the “Sockets” editor.
Step 7: In Visuino: Add and connect Rotary Encoder component
Type “rotar” in the Filter box of the Component Toolbox then select the “Rotary Encoder Sensor” component (Picture 1), and drop it in the design area
Connect the “Out” pin of the Digital[ 2 ] channel of the “NodeMCU ESP-12″component to the “Clock(A)” pin of the RotaryEncoderSensor1(Picture 2)
Connect the “Out” pin of the Digital[ 3 ] channel of the”NodeMCU ESP-12″
component to the “Direction(B)” pin of the RotaryEncoderSensor1(Picture 3)
Step 8: In Visuino: Add and connect Up/Down Counter component
We need a counter to count the Up/Down rotations from 0 to 100, and we need to set in in the middle/neutral 50:
Type “count” in the Filter box of the Component Toolbox then select the “Up/Down Counter” component (Picture 1), and drop it in the design area
In the Object Inspector set the value of the InitialValue property to 50(Picture 2)
In the Object Inspector expand the Counter’s Min property
In the Object Inspector set the value of the RollOver sub property to False(Picture 3)
In the Object Inspector set the
value of theValue sub property to 0 (Picture 3)
In the Object Inspector expand the Counter’s Max property(Picture 5)
In the Object Inspector set the
value of theRollOver sub property to False(Picture 5)
In the Object Inspector set the value of the Value sub property to 100(Picture 6)
Step 9: In Visuino: Connect the Up/Down Counter component
Connect the “Down” pin of the RotaryEncoderSensor1 component to the “Down” pin of the UpDownCounter1 component (Picture 1)
Connect the “Up” pin of the RotaryEncoderSensor1 component to the “Up” pin of the UpDownCounter1 component (Picture 2)
Connect the “Out” pin of the” Digital[ 4 ]” channel of the “NodeMCU ESP-12” component to the “Reset” pin of the UpDownCounter1 (Picture 3)
The Rotary encoder module switch that I have does not have pull up resistor. The ESP8266 however has built-in optional pull-up resistors for the pins. To enable the pull-up resistor for the Digital pin 4:
In the Object Inspector expand the “Digital” property, then the “Digital[ 4 ]” sub property (Picture 4)
In the Object Inspector set the value of the IsPullUp sub property to True(Picture 4)
Step 10: In Visuino: Add and connect Integer To Analog component
The servo needs analog value in the range between 0 and 1.0, so we need to convert the count to Analog and multiply it by 0.01 to convert the 0 to 100 range into Analog 0 to 1.0:
Type “To Analo” in the Filter box of the Component Toolbox then select the “Integer To Analog” component (Picture 1), and drop it in the design area
In the Object Inspector set the Scale property to 0.01 (Picture 2) . This will convert the counter values from the integer range of 0 to 100, to the analog range of 0.0 to 1.0.
Connect the “Out” pin of the UpDownCounter1 to the “In” pin of the IntegerToAnalog1 component (Picture 3)
Step 11: In Visuino: Add and Make Structure component, and add Analog channel to it
We need to send the analog value over the UDP. To do that we will make a structure with analog value and will send it over the UDP socket.
Type “make” in the Filter box of the Component Toolbox then select the “Make Structure” component (Picture 1), and drop it in the design area
Click on the “Tools” button (Picture 2) to open the “Elements” editor (Picture 3)
In the “Elements” editor select the “Analog” element, and then clickon the “+” button (Picture 3) to add an Analog element (Picture 4)
Close the “Elements” editor.
Step 12: In Visuino: Connect the Make Structure component
Connect the “Out” pin of the MakeStructure1 component to the “In” pin of the “Modules.WiFi.Sockets.UDPSocket1” of the “NodeMCU ESP-12” component (Picture 3)
Connect the the “In” pin of the “Elements.Analog1” element of the MakeStructure1 component to the “Out” pin of the IntegerToAnalog1component (Picture 3)
Step 13: Generate, Compile, and Upload the ESP8266 code for the Rotary Encoder Module
In Visuino, Press F9 or click on the button shown on Picture 1 to generate the Arduino code, and open the Arduino IDE
Connect the first NodeMCU module (The one with the Rotary Encoder) with USB cable to the computer
Select the board type and serial port as I have shown you in this Inctructable
Make sure you have installed the latest staging version of the ESP support! The stable release does not have some of the latest features, and you will have errors when you try to compile!
In the Arduino IDE, click on the Upload button, to compile and upload the code (Picture 2)
Step 14: In Visuino: Select the ESP8266 Board type, and configure it to connect to the Access Point
Now lets program the Servo module.
Start new project.
Click on the “Tools” button on the Arduino component, and when the dialog appears, select “NodeMCU ESP-12” as you did in Step 4 for the Rotary Encoder module
Next we need to configure the module to connect to the Access Point of the Thermometer module, and use a fixed IP Address of 200.200.200.200
In the Object Inspector, expand the “Modules” property, then the “WiFi” sub property, then the “AccessPoints” sub property, and click on the “…” button next to its value (Picture 1)
In the “AccessPoins” editor, select “WiFi Access Point”, and then click on the “+” button to add the access point (Picture 2)
In the Object Inspector, set the value of the “SSID” property to “ServoRemote” (Picture 3)
In the Object Inspector, expand the “Config” property, and set the value of the “Enabled” sub property to “True” (Picture 4)
In the Object Inspector, set the value of the “IP” sub property to “200.200.200.200” (Picture 5)
Step 15: In Visuino: Add an UDP Socket for the communication
Next we need to add an UDP socket for the communication.
In the Object Inspector, click on the “…” button next to the value of the Sockets sub property of the WiFi (Picture 1)
In the Sockets editor select “UDP Socket”, and then click on the “+” button (Picture 2)
In the Object Inspector, set the value “RemoteIPAddress” property to “200.200.200.200” (Picture 3)
In the Object Inspector set the value of the “Port” to “8888” (Picture 4)
Step 16: In Visuino: Add Split Structure component, and add Analog channel to it
The Remote Control module sends the servo position in binary floating point form as a packet. We need to decode it properly. For this we need a “Split Structure” component with “Analog” element in it.
Type “struct” in the Filter box of the Component Toolbox then select the “Split Structure” component (Picture 1), and drop it in the design area
Click on the “Tools” button (Picture 2) to open the Elements editor (Picture 3)
In the “Elements” editor select the “Analog” element, and then click on the “+” button (Picture 3) to add an Analog element (Picture 4)
Close the Elements editor.
Step 17: In Visuino: Add and connect Servo component
Type “servo” in the Filter box of the Component Toolbox then select the “Servo” component (Picture 1), and drop it in the design area
Connect the “Out” pin of the Servo1 component to the “Digital” input pin of Digital[ 2 ] channel of the Arduino component (Picture 2)
Connect the “In” pin of the Servo1 component (Picture 3) to the “Out” pin of the “Elements.Analog1” of the SplitStructure1 component (Picture 4)
Step 18: Generate, Compile, and Upload the ESP8266 code for the Servo
In Visuino, Press F9 or click on the button shown on Picture 1 to generate the Arduino code, and open the Arduino IDE
Connect the second NodeMCU module (The one with the Servo) with USB cable to the computer
Select the board type and serial port as I have shown you in this Inctructable
In the Arduino IDE, click on the Upload button, to compile and upload the code (Picture 2)
Step 19: And play…
Congratulations! You have completed the project.
Picture 1 shows the connected and powered up project.
If you rotate the Rotary Encoder back and forth, the Servo will move in the same direction, as you can see in the video. If you press the Rotary Encoder shaft down, the Servo will move to neutral center position.
On Picture 2 you can see the complete Visuino diagram for the Rotary Encoder Remote Control module.
On Picture 3 you can see the complete Visuino diagram for the Servo module.
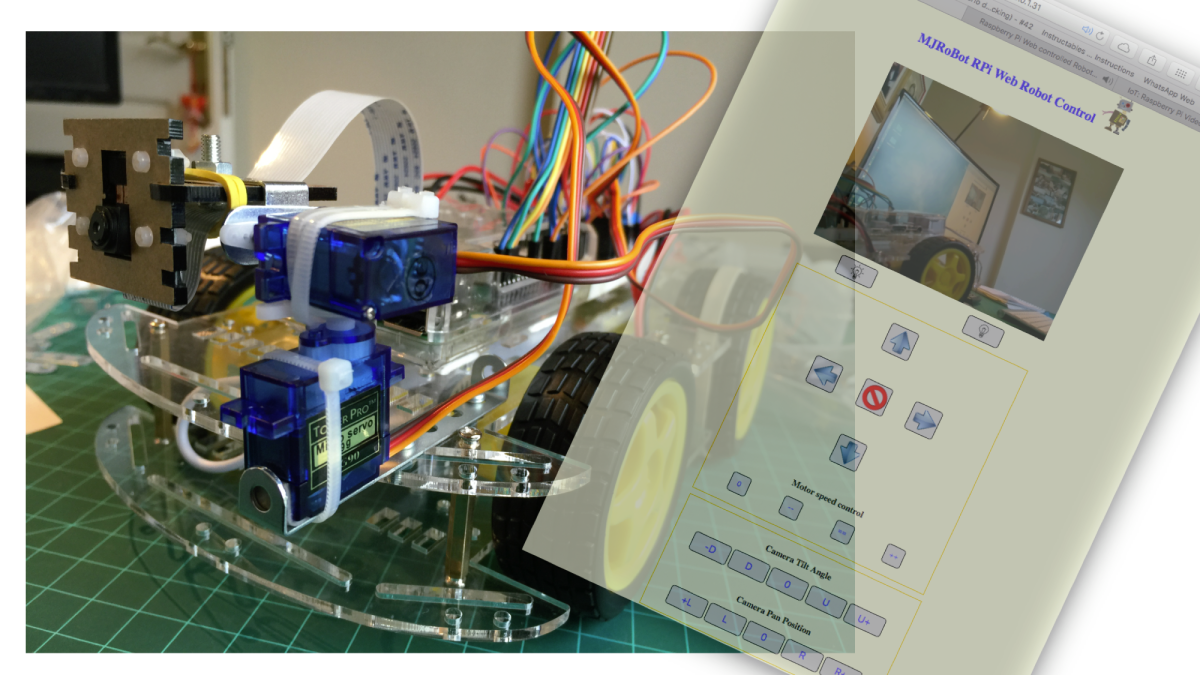
이 프로젝트의 아이디어는 상기 프로세서로 라즈베리 파이를 사용하여 인터넷을 통해 완전히 제어 로봇을 생성하는 것이다. 로봇은 HTML로 작성된 웹 페이지에 의해 직접 제어 턴에있는 쉘 스크립트 작성 저수준의 명령을 사용하여 제어된다. 우리는 예를 들면 파이썬 같은 고급 언어를 사용하는 사실은, 로봇이 페이지 (인터넷 속도가 느린 경우에도)에 의해 수신 된 명령에 빠르게 반응하도록 야기된다.
아래 링크에서는 어떻게 완성 된 프로젝트를 볼 수 있습니다
이 프로젝트는 두 부분으로 분할하고, 배울 것 1 부에서한다 :
설치 및 GPIO가 RPI를 제어하는 라이브러리 WiringPi를 사용
는 H-Bridge를 사용하여 제어 모터
웹 서버의 RPI 변형
인터넷을 통해 상기 로봇을 제어하기 위해 HTML (자바 스크립트)에 페이지를 만들기
더 나아가 로봇이 현실 세계의 “비전”을 가지고 있는지 확인하기 위해, 당신은 당신이 배울이 튜토리얼의 두 번째 부분에 갈 수 있습니다 :
물어와 비디오 스트림을 생성하는 방법
설치 및 라이브러리 ServoBlaster를 사용하는 방법
서보 모터를 제어하고, 카메라의 수직 및 수평 위치 (WFP / 틸트기구) 메커니즘을 구축하는 방법
인터넷을 통해 카메라의 위치를 제어하기 위하여 HTML 페이지를 작성
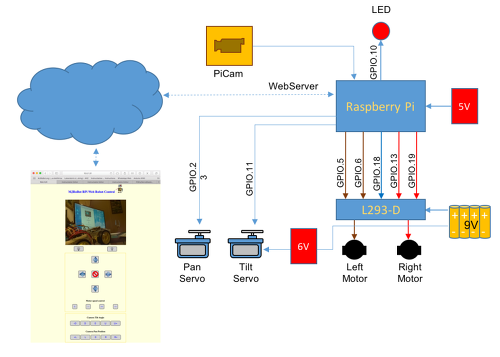
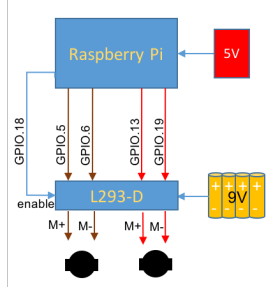
블록 다이어그램은 아래 날개 프로젝트의 두 부분에 대한 일반적인 생각을 보여줍니다
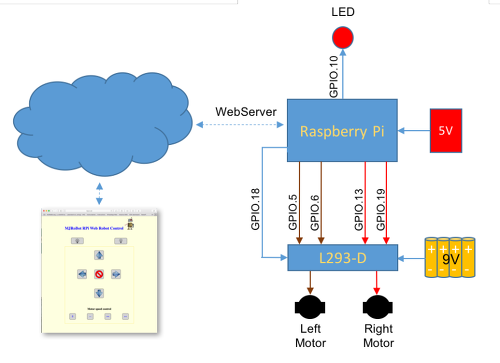
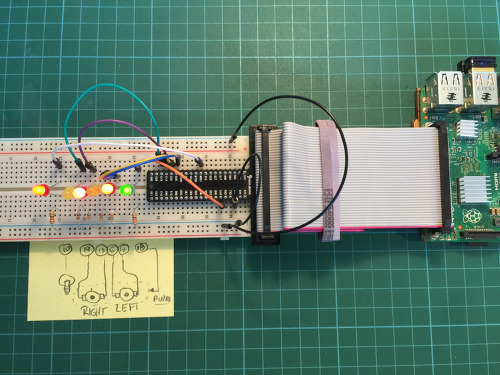
부 : 인터넷을 통해 조명 및 모터 제어
RPI는 웹 서버로 정의하고 HTML 페이지로부터 명령을 수신한다. 이러한 명령은 RPI 로봇 (방향과 속도)의 모터를 제어 일으키는 개의 GPIO의 상태를 변경 및 / 떨어져 LED에 (시뮬레이션 디지털 제어 시스템을 더)한다. 당신이 볼 수 있듯이, 로봇은 실제로 만약 IoT 프로젝트의 특별한 경우이다. 당신은 실제로 당신이 원하는 것을 제어 할 수 있으며,이 튜토리얼은 새로운 아이디어가 미래에 구현 될위한 출발점이 될하기위한 것입니다.
아래의 그림, 우리는이 첫 번째 부분에서 개발되는의 개요에서 :
자료의 목록
라즈베리 파이 모델 2 또는 3
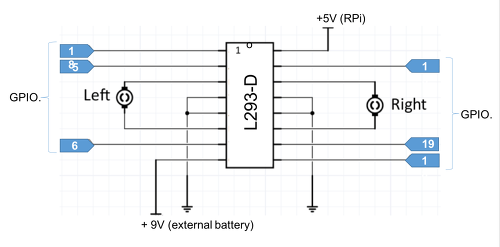
H 브리지 L293-D
DC 모터 (2 배)
드라이버 9V 배터리
RPI에 배터리 5V
LED와 30 옴의 저항
브레드 보드 및 전선
아크릴 엔진 / 전자 제품에 대한 지원 (키트, CD를, 등을 할 수 있습니다)
도서관 WIRINGPI의 설치
WiringPi는 C로 작성된 라이브러리가 GPIO가의 RPI에 직접 액세스하는 데 사용됩니다. 매우 쉽게 쓸 수 있으며 크게 ( “embebeda 시스템”) RPI 및 전자 관련된 모든 프로젝트를 단순화합니다.
라이브러리 WiringPi는 “GPIO”프로그램 및 GPIO 핀을 구성 할 수 있습니다 (wiringpi.com/the-gpio-utility)라는 유틸리티가 포함되어 있습니다. 당신은 읽기 및 / 또는 쉘 스크립트와 같은 명령의 RPI의 핀에 직접 작성하는 유틸리티를 사용할 수 있습니다. 당신은 GPIO 쉘 스크립트에 명령 정수를 사용하여 프로그램을 작성할 수 있습니다.
WiringPi를 설치하려면 :
git clone git://git.drogon.net/wiringPi
cd wiringPi
./build
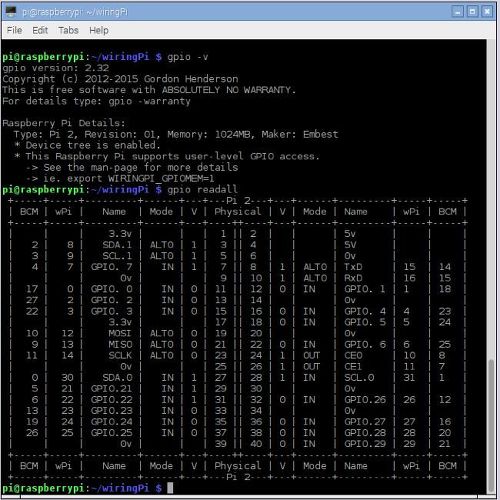
유틸리티의 화면 버전을 표시하려면 다음 명령을 사용합니다 :
gpio -v
일반적으로 액세스 모든 핀을 읽고 그 모드를 상호 참조 표를 작성하는 다른 포맷 (wiringPi, BCM_GPIO 핀 및 물리적)의 핀의 상태가 “GPIO의 ReadAll 메쏘드를”명령어를 사용할 수있는 테이블을 제시 현재 값을 표시합니다. 이 명령은 RPI와 파이에 적합한 인쇄도 소나무의 버전 / 모델을 감지합니다.
gpio readall
모니터 화면 아래 위의 두 명령의 항목의 결과를 나타낸다.
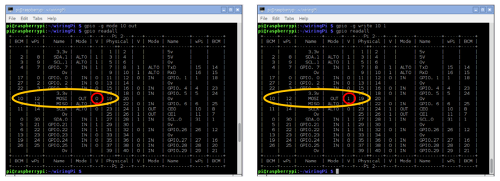
예를 들면, 출력으로서 BCM_GPIO 방식을 사용하여 하나의 GPIO를 설정하는 명령을 사용하는 것 :
gpio mode -g 10 out
가능 GPIO 핀이 정의 모드가되면, 당신은 동일한의 논리 상태를 정의 할 수 있습니다. 예에서, 핀은 논리 하이 상태로 이동한다 :
gpio write -g 10 1
그 양극과 GND 사이에 330ohm 저항을 부가 LED GPIO.10 핀의 음극을 설치 테스트합니다. 확실히 모든 것이 작동하는지 확인하기 위해 몇 가지 검사를 수행합니다.
출력 또는 입력으로 핀을 설정할 수있는 것 외에도 PWM 형식의 출력으로서 그 중 일부를 설정할 수있다. 이것은 물리적 핀 12 GPIO.18의 경우이다.
핀을 설정하려면 :
gpio -g mode 18 pwm
또는
gpio mode 1 pwm 참고 : ( “1”) GPIO.18에 WPI ID입니다
PWM 값을 설정합니다 :
gpio pwm 1 XXX 참고 : [XXX 0 사이의 값입니다 -> 1023]
예. :
gpio pwm 1 512 참고 : (50 % 듀티 cicle)
이 핀 particularmante의 구성을 제거하려면 :
gpio unexport 1
모든 핀 구성을 제거하려면 :
gpio unexportall
라즈베리 PI 및 LIBRARY WIRINGPI WITH 제어 모터
이 시점에서, WiringPi 라이브러리가 설치되어 있고 당신은 당신의 RPI의 모니터에 명령 줄에서 직접 GPIO를 제어 할 수 있습니다. 다음 단계는 모터를 제어하기위한 로직을 생성하는 것이다. 이를 위해, 우리는 H-다리의 L-293-D를 사용합니다. 이 H- 브리지는 2 개의 모터를 제어 할 수 있고, 모터의 각각에 대해 입력 3 필수 :
왼쪽 엔진 : “활성화”; “모터 +”와 “모터 -”
모터 오른쪽 : “활성화”; “모터 +”와 “모터 -”
항목에서 두 엔진은 서로 연결되어 “사용”GPIO.18에 의해 제어된다. 이 핀은 속도 제어에 대한 책임이 있습니다. 만약, 속도를 제어하는 “1”로 핀을하게 할 필요가없는 경우, 예를 들어 (+ 5V에 연결).
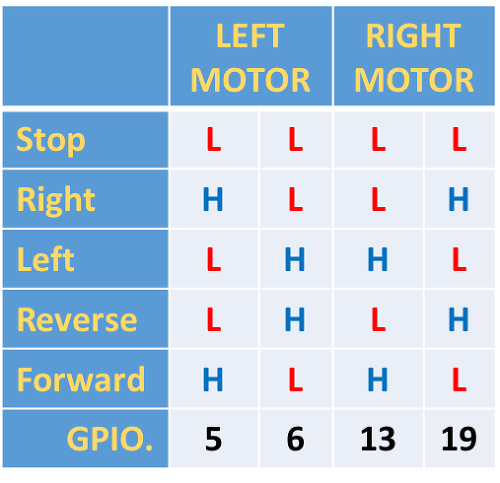
우리는 왼쪽 엔진이 “앞으로”이동하려는 경우, 우리는 + 모터 (M의 +)를 설정해야합니다, 협약 “1”과 모터 – (M-) “0”. 모터가 반대 방향으로 회전되도록 우리가 대향 할 것이다 : 엔진 + (M +)을 “0”으로 모터 – (M-) “1”이다. 실제로, 엔진의 방향을 정확하게 제어 입력을 정의하는 가장 좋은 방법은 동일한 조립하여 테스트하는 것이다.
우리는 항목의 다리에 개의 GPIO를 할당합니다 :
왼쪽 엔진 + : GPIO.5
왼쪽 모터 : GPIO.6
오른쪽 엔진 + : GPIO.13
오른쪽 엔진 – : GPIO.19
위의 가정에 기초하여, 논리는 GPIO를 테이블에 할당 될 수 수준 (표 화상을 참조)로 구축 할 수있다.
다음 단계는 엔진을 구동하기 위해 쉘 스크립트를 생성하는 것이다.
각 스크립트는 기본적으로 단순 텍스트 파일 형식이다. 텍스트 파일을 실행하려고하면, 운영 체제는 스크립트인지 아닌지를 결정하는 단서를 검색하며, 어떻게 적절하게 처리. 이 때문에, 당신이 알아야 할 몇 가지 지침이있다.
각 스크립트로 시작해야합니다 “#!/bin/bash”(해쉬 – 뱅 해킹}
각각의 새로운 라인은 새로운 명령입니다
주석 행은 #로 시작
명령은 ()에 의해 둘러싸여있다
운영체제 (쉘)은 텍스트 파일을 분석하면 스크립트의 첫 줄이 제작 될 때, 가장 직접적인 방법은 파일을 식별하기 #! / 빈이 / 떠들썩한 파티! 주석 행은 해시 (#)로 시작하지만 다음 OS를 강제 뱅 (!)와 쉘 경로를 추가하는 스크립트를 실행합니다.
예를 들어, “앞으로”이동합니다 모터를 제어하는 쉘 스크립트를 작성하고, 위의 테이블을 기반으로, 우리는 텍스트 편집기를 수행해야하고 I를 사용하고 당신을 위해 가장 적합한 편집기를 사용하여 (아래의 파일을 생성 이것에 대한 NANO) :
sudo nano forward.cgi
#!/bin/bash
gpio -g write 5 1
gpio -g write 6 0
gpio -g write 13 1
gpio -g write 19 0
스크립트가 생성되면, 우리는 당신에게 실행할 수있는 권한을 부여해야합니다 :
sudo chmod 755 forward.cgi
이제 스크립트를 실행합니다 :
sudo ./forward.cgi
LED가 스크립트를 테스트하는 데 사용하고, 실제 엔진은 이후의 단계에서 첨가 될 것이다.
파일 확장자와 같은 것을 사용 .cgi로 참고. CGI는 “공용 게이트웨이 인터페이스”를 의미합니다. 이 웹 서버는 동적 웹 페이지를 생성하는 서버에 설치 실행 프로그램과 상호 작용하는 표준 방법입니다. 이러한 프로그램은 CGI하거나 CGI를 스크립트로 알려져 있습니다; 그들은 일반적으로 스크립팅 언어로 기술되지만, 임의의 프로그래밍 언어로 기록 될 수있다.
계속해서, 같은 아이디어는 상기 테이블의 다른 조합에 적용한다 :
sudo nano stop.cgi
#!/bin/bash
gpio -g write 5 0
gpio -g write 6 0
gpio -g write 13 0
gpio -g write 19 0
sudo nano reverse.cgi
#!/bin/bash
gpio -g write 5 0
gpio -g write 6 1
gpio -g write 13 0
gpio -g write 19 1
sudo nano left.cgi
#!/bin/bash
gpio -g write 5 0
gpio -g write 6 1
gpio -g write 13 1
gpio -g write 19 0
sudo nano right.cgi
#!/bin/bash
gpio -g write 5 1
gpio -g write 6 0
gpio -g write 13 0
gpio -g write 19 1
스크립트를 작성하면 forward.cgi으로 수행되었을 때, 당신은 그들에게 동일하게 실행할 수있는 권한을 부여해야합니다
sudo chmod 755 stop.cgi
sudo chmod 755 reverse.cgi
sudo chmod 755 left.cgi
sudo chmod 755 right.cgi
이제 모든 것이 작동하는지 확인하기 위해 몇 가지 테스트를 실행합니다 :
./forward.cgi
./left.cgi
./reverse.cgi
./right.cgi
./stop.cgi
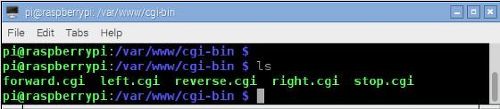
좋은 방법은 자주 사용하는 프로그램에 대한 특정 디렉토리가 있고 “빈”을 호출하는 것입니다. 그래서, 우리는 프로젝트에서 사용하는 스크립트를 저장하려면, 우리는 예를 들어, 모든 실행 스크립트를 포함하는 CGI-빈 (또는 바이너리 파일)에 대해 디렉토리를 작성해야합니다.
우리가 우리의 웹 사이트가 위치하며 “VAR”에서 “WWW”디렉토리를 만들어 보자 그 아래, 스크립트 디렉토리 “CGI – bin에”
sudo mkdir /var/www
sudo mkdir /var/www/cgi-bin
이제, 우리는 새로운 디렉토리에있는 모든 파일을 이동 :
sudo mv /*.sgi /var/www/cgi-bin
cd /var/www/cgi-bin
ls 명령을 사용하여 만든 파일을 볼 수 있습니다 :
/ 오프 LED 및 제어 엔진 속도 ON (선택 사항)
우리는 H 브리지 모터 제어를위한 oL293-D로 사용하기 때문에, 우리는 방향을 넘어, 우리는 또한 속도를 제어 할 것인지 여부를 결정해야합니다.
두 가지 가능성이 여기에 :
고정 속도 : 두 개의 저항으로 전압 분배기를 사용하여 연결 핀 1과 + 5V (최대 속도) 또는 다른 비례 값의 다리 (활성화) 9
나무 딸기 파이 GPIO.18에 연결 핀 1과 9 (PWM 출력)
우리는 우리가 조향 제어를 설정했던 것과 같은 방식으로 스크립트의 그룹을 생성합니다 :
sudo nano nospeed.cgi
#!/bin/bash
gpio pwm 1 0
sudo nano lowspeed.cgi
#!/bin/bash
gpio pwm 1 250
sudo nano regularspeed.cgi
#!/bin/bash
gpio pwm 1 512
sudo noano highspeed.cgi
#!/bin/bash
gpio pwm 1 1023
스크립트가 생성되면, 당신은 그들에게 실행할 수있는 권한을 부여해야합니다 :
sudo chmod 755 nospeed.cgi
sudo chmod 755 lowspeed.cgi
sudo chmod 755 regularspeed.cgi
sudo chmod 755 highspeed.cgi
자, 그냥 모든 것이 작동하는지 확인하기 위해 몇 가지 테스트를 실행합니다 :
./lowspeedcgi
./regularspeed.cgi
./highspeed.cgi
./nospeedcgi
테스트를 위해, 우리는 그의 섬광의 강도는 명령이 작동 볼 수 GPIO.18에 LED를 연결합니다.
마지막으로, 우리는 예를 들어, 나 램프를 끄려면 사용되는 디지털 출력을 제어하는 별도의 스크립트를 생성합니다. 우리는이에 대한 GPIO.10을 사용합니다 :
sudo nano llighton.cgi
#!/bin/bash
gpio -g write 10 1
sudo nano llightoff.cgi
#!/bin/bash
gpio -g write 10 0
sudo chmod 755 lighton.cgi
sudo chmod 755 lightoff.cgi
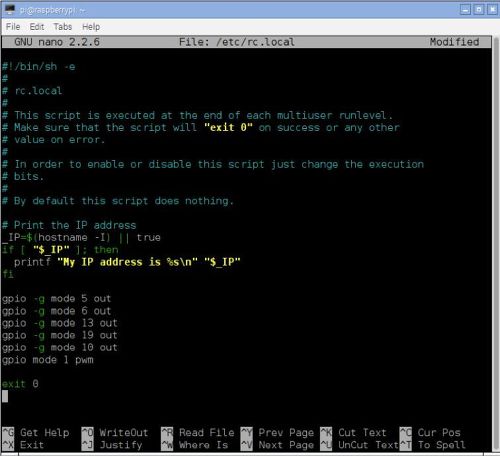
마지막 한가지 다른 단계로 이동하기 전에. 당신이 RPI를 다시 시작하면 개의 GPIO는 입력 기본 상태로 돌아갑니다. 그래서 우리는 모든 부팅의 시작 부분에 실행을 /etc/rc.local 스크립트를 변경해야합니다.
그냥 스크립트의 마지막 명령 (종료 0) 전에 GPIO가 모드 설정 명령을 포함합니다 :
sudo nano /etc/rc.local
…
gpio -g mode 5 out
gpio -g mode 6 out
gpio -g mode 13 out
gpio -g mode 19 out
gpio -g mode 10 out
gpio mode 1 pwm
exit 0
“출구 0″직전의 커맨드 라인으로서 PWM 명령을 갖는 것이 좋다.
RPI를 시작할 때마다 이제 영사 출력을 제어 할 준비가 될 것이다.
즐길 이제 시스템을 다시 부팅합니다
sudo reboot
설치하기 WEBSERVER
매우 가볍고 빠른 웹 서버입니다 lighttpd를 설치합니다 (예를 들어 대신 아파치 사용할 수 있습니다). 그 위키 페이지에 기재된 바와 같이 “이 Lighttpd 고성능 환경에 최적화 빠르고 유연한 보안 웹 서버가있다. 그것은 다른 웹 서버에 비해 낮은 메모리 풋 프린트를 가지고 있으며, 너무 CPU를로드 할주의하십시오.
이제이 Lighttpd 및 해당 구성 요소를 설치하자 :
sudo apt-get -y install lighttpd
sudo lighttpd-enable-mod cgi
sudo lighttpd-enable-mod fastcgi
기본적으로,이 Lighttpd 디렉토리에 index.html 페이지를 찾을 경우 : / var / www /에서 HTML을. index.html을이 폴더에 직접 저장할 수 있도록하자,이를 변경하자의 경우 : / var / www가. 이를 위해, 당신은이 Lighttpd 구성 파일을 편집해야합니다 :
sudo nano /etc/lighttpd/lighttpd.conf
변경:
server.document-root =“/var/www/html”
으로:
server.document-root =“/var/www”
이 변경 사항을 적용하기 위해 중지하고 웹 서버를 다시 시작해야합니다 :
sudo /etc/init.d/lighttpd stop
sudo /etc/init.d/lighttpd start
이때, 웹 서버가 실행되고 index.html 페이지는 단지 IP 어드레스를 입력 RPI,은 / var / www가, 우리는 브라우저로부터 액세스 할 수 있습니다.
우리는 테스트 목적으로 간단한 페이지를 작성합니다.
첫째, 우리는 페이지 이미지를 저장하는 디렉토리를 작성 :
mkdir /var/www/images
(시험, 난 이미 디렉토리 (/images/robot52.png)에 나에게 .PNG 파일을 보낸 있습니다 :
cd / var / www
sudo index.html nano
<html>
<head>
</head>
<style>
body {background-color: lightyellow}
h1 {color:blue}
</style>
<body>
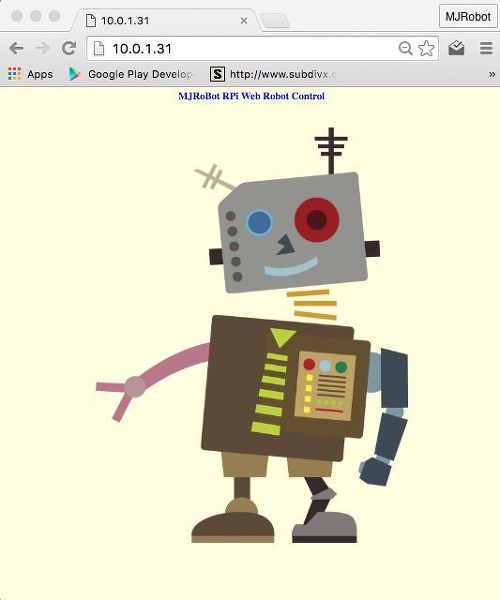
<div style=”text-align:center”>
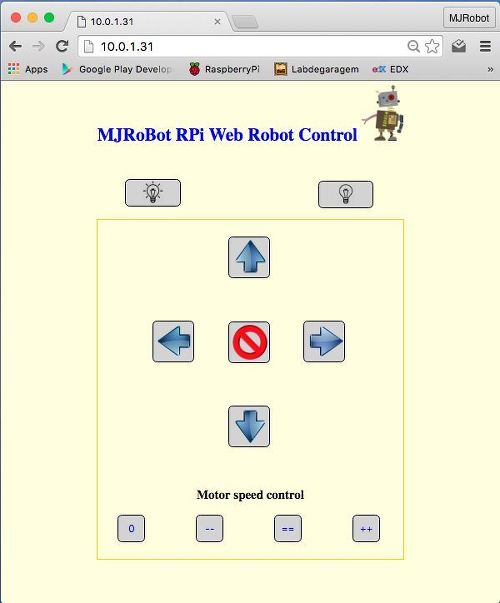
<h1>MJRoBot RPi Web Robot Control</h1>
<br><br>
<img src=”/images/robot52.png”>
</body>
</html>
페이지를 편집 완료 후, 저장 및 사용 권한을 변경 :
sudo chmod 755 index.html
지금 내 경우 예를 들어, IP 주소 라즈베리 파이를 브라우저를 열고 입력 : 10.0.0.31을
최종 결과는 아래에 볼 수있다 :
로봇을 제어하기 ONE PAGE의 HTML을 생성하기
의 우리의 웹 사이트를위한 심플한 디자인을 생각하자. 무엇을 할 수 명령?
lighton.cgi 및 lighoff.cgi : 두 개의 버튼은 ==> 스크립트로 작동 켜고 불을 끕니다
모터 제어 방향 다섯 버튼 ==> 스크립트로 작동합니다 forward.cgi, stop.cgi, left.cgi, right.cgi 및 reverse.cgi
모터 속도 제어를위한 네 개의 버튼 ==> escripts 작동합니다 : nospeed.cgi, lowspeed.cgi, regularspeed.cgi 및 highspeed.cgi
우리가 마지막 단계에서 생성 된 HTML의 index.html 파일을 사용하여, 우리는 자신의 스크립트 구현을위한 통화 기능을 설정 버튼이 포함됩니다.
버튼을 누를 때, 명령 “의 onclick = LIGHTON는 ()”은 “LIGHTON는 ()”함수를 호출하기 때문에 :
function lighton()
{
xmlhttp.open(“GET”,”cgi-bin/lighton.cgi”,true
xmlhttp.send();
}
LIGHTON () 함수가 호출되기 때문에 그리고, 스크립트가 lighton.cgi와 “짜잔는”LED가 켜집니다 실행됩니다.
동일한 절차가 다른 버튼을 사용한다. 외관을 구성하고 페이지를 작성하는 데 사용되는 다른 HTML 태그가있다.
HTML 소스 파일 (이전 단계에서 사용되는 LED의 구성의 테스트 페이지)에서 볼 수있다 :
HTML 페이지에 링크
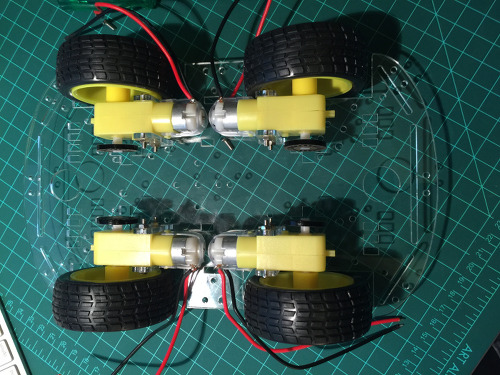
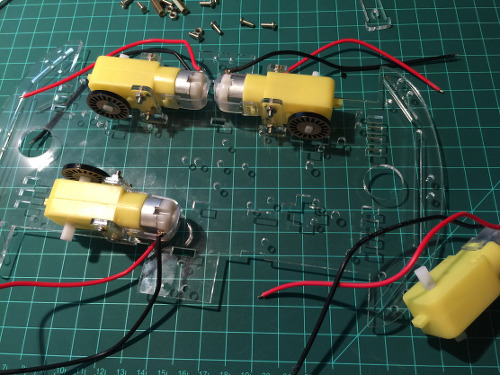
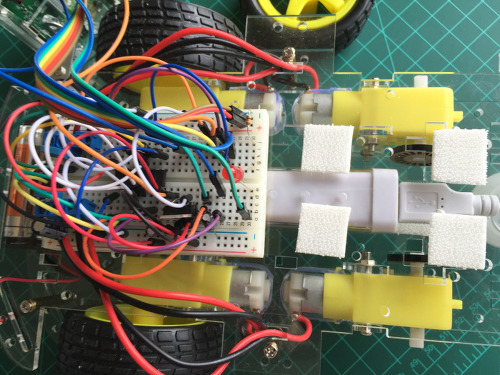
ROBOT BODY ASSEMBLY
우선 플랫폼을 찾는 것입니다. 나는 4 DC 모터와 4WD 키트를하기로 결정했다. 이동성 분석은 4WD가 (코너링을 위해) 여기에서 생각하기 때문에 제어가 용이 아니라고하지 않습니다 실현, 우리는 완전한 로봇을 설정하지만, 실제 테스트는 나는 “코스터”를 추가하여 후륜을 사용 just’ll 전면에 ( “rolon”와 같은 탈취제 남아).
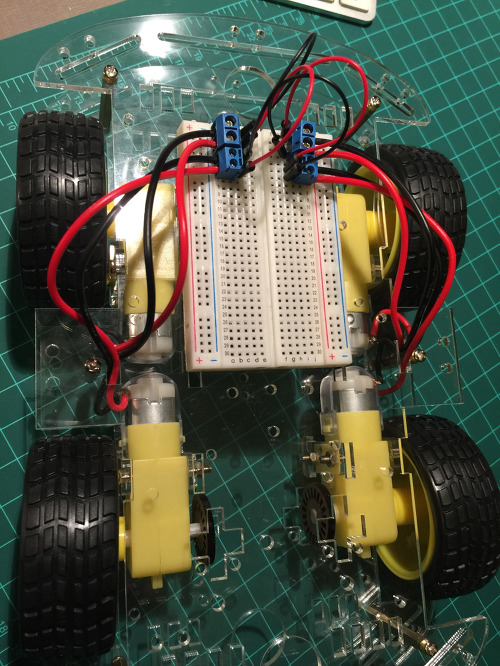
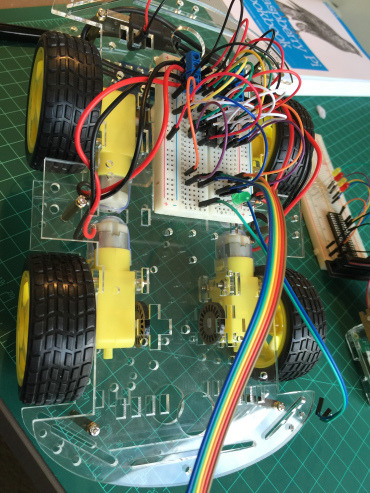
몸과 엔진이 제자리에 후에는, 브레드 보드를 포함 모터 연결하고 테스트하는 시간이다. 각각의 모터를 테스트하기 위해 외부 배터리를 사용합니다.
아래 그림과 같이 엔진은 H 브리지 D-L293에 의해 제어됩니다
이 시점에서, 당신은 또한 RPI의 GPIO가 시뮬레이션, 다리의 입력에 + 5V와 GND를 사용하여 모터를 제어, 테스트를 수행 할 수 있습니다.
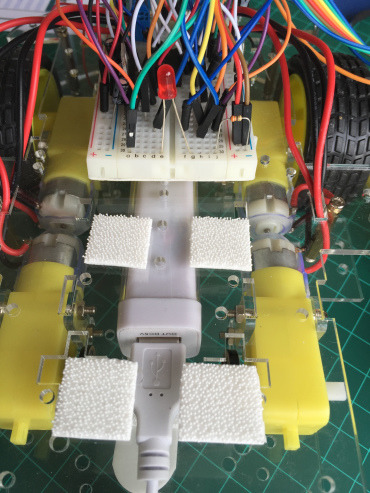
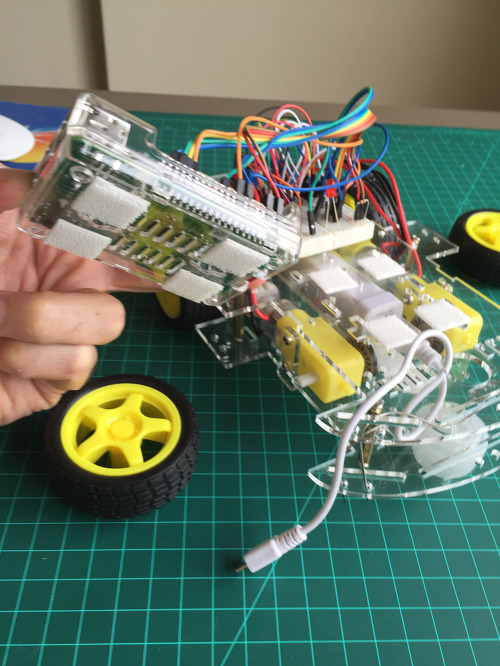
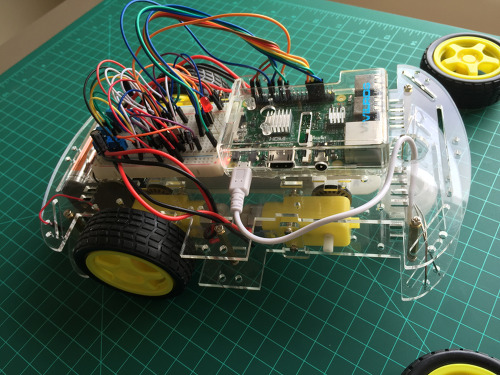
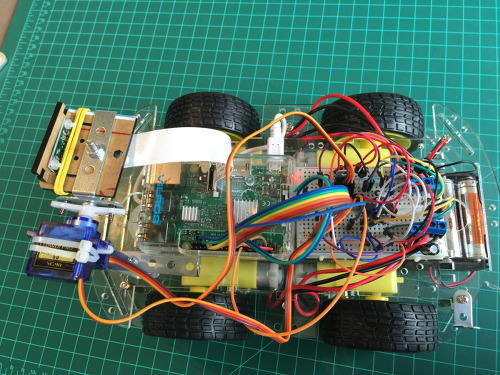
RPI 설치
모든 corretamante 작동되면, 그것은 라즈베리 파이를 추가하는 시간이다. 전체 회로는 다음과 같습니다 :
작은 섀시와 엔진 사이의 RPI 5V 배터리를 설치합니다. RPI는 상단에 있습니다.
은 RPI를 켜기 전에 모든 케이블 연결을 확인합니다.
이전의 모든 단계가 OK 인 경우에, 당신은 IP 주소 RPI를 사용하여 로봇을 제어 할 수 있습니다.
당신의 마음에 드는 웹 브라우저와 안전한 여행을 엽니 다!
이하, 로봇이 웹 페이지를 사용하여 테스트가 비디오 :
파트 2 : 인터넷 카메라의 비디오 스트리밍 및 원격 제어 (팬 / 틸트)
도입에서 설명하고있는 바와 같이, 로봇은 사물의 인터넷 사업을 개발하는 변명은 거의이다. 우리가 여기 짓을하면 거기에서, 우리는 거의 모든 것을 제어 할 수 있습니다 Internet.The를 통해 GPIO가 RPI를 제어하는 것입니다!
이 두 번째 부분에서, 우리는 고통을 탐구 비디오를 스트리밍하는 방법도 서보 모터를 사용하여 카메라의 위치를 제어하는 방법을 찾을 수 있습니다. 인터넷을 통해 카메라를 제어하는 것은 보안에 사용하기 위해 포함, 여러 용도를 가질 수 있습니다.
궁극적 인 목적은 상기 프로젝트의 두 부분을 결합 만이 인터넷을 통해 제어 할 수없는 로봇을 만들뿐만 아니라, 스트리밍 비디오를 전송하는 것이다.
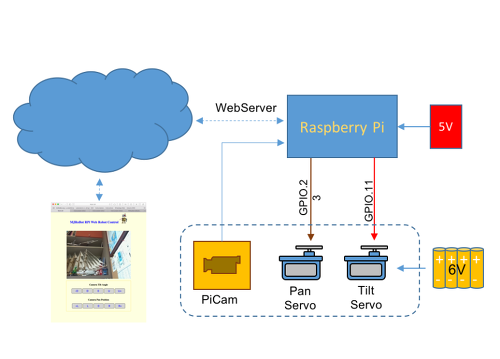
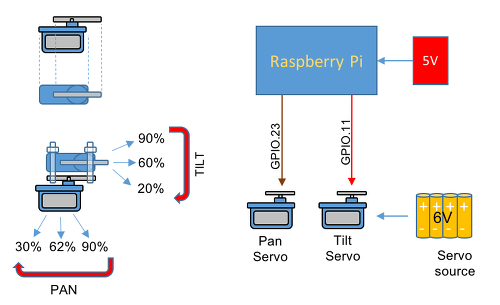
블록 다이어그램은이 프로젝트의 두 번째 부분의 개념을 도시한다.
RPI는 웹 서버로 프로그래밍 및 HTML 페이지로부터 명령을 수신한다. 이 명령은 위치는 서보 모터 (팬 / 틸트와 수평 / 수직)를 통해 파고, GPIO가 RPI를 제어합니다.
자료리스트
이전 재료의 목록, 우리는 고통과 두 개의 미니 서보 180도를 추가합니다. 그것은 Voltagen 6V 레귤레이터 (7806)는 엔진 전원 같은 이미 설치된 9V 배터리를 사용할 수있게하는 것이 필요하다.
스트리밍 비디오
튜토리얼을 기반으로 비디오 트리머 물기를 설치합니다 :
엘 모타 (업데이트 2014년 1월 19일)가 개발 라즈베리 파이 보드 카메라 비디오 스트리밍.
ISO 400, Video Stabilisation No, Exposure compensation 0
Exposure Mode ‘auto’, AWB Mode ‘auto’,
Image Effect ‘none’, Metering Mode ‘average’,
Colour Effect Enabled No with U = 128, V = 128
Rotation 0, hflip No, flip No
www-folder-path…: /opt/mjpg-streamer/www/
HTTP TCP port…..: 9000
username:password.: disabled
commands……….: enabled
Starting Camera
Encoder Buffer Size 81920
카메라가 작동되어야한다. 브라우저 및 유형으로 이동
http : // 당신의 IP 주소 : 9000 / stream.html
것과 같은 테스트 페이지 아래 (카메라에 의해 촬영 된 이미지) 표시됩니다.
참고 당신은 당신을 위해 가장 적합한 하나, 통신 포트를 변경하면 RPI 모니터를 입력 한 명령 줄에서 매개 변수 “9000”를 변경하려는 경우. 우리 15 초당 프레임 수 (fps) 640 × 480의 해상도로 작업합니다. 또한 명령 행에 이러한 매개 변수를 변경할 수 있습니다.
당신은 당신이하는 /etc/rc.local 스크립트에 명령을 포함하지 않으면 다음과 같이 드라이브를 시스템이 다시 시작할 때마다 (재부팅)을 시작하려면 위의 명령 줄을 다시 입력해야합니다 :
이는 GPIO 핀을 통해 복수의 서보 모터를 제어하기위한 인터페이스를 제공 라즈베리 파이위한 특정 소프트웨어이다. 사용자는, 출력의 펄스 폭을 변경 명령을 전송하여 종의 위치를 제어한다. GPIO는 이전 값을 변경하는 새로운 명령을 전달하는 당신에게 펄스 폭을 유지합니다.
기본적으로 ServoBlaster 8 서보 모터를 제어하도록 구성되어 있지만 21 서보로 설정 일반적으로 펄스 폭의 위치를 제어 0.5 밀리 초 2.5 밀리 초 사이 어딘가에 활성 펄스를 필요로 할 수 있습니다 종. 주파수가 중요하지는 않지만 펄스는 약 20 밀리 초마다 반복한다. 펄스는이 서보 위치로 직접 번역이기 네, 그것은 중요 폭.
서보 제어에 더하여, ServoBlaster은 적합한 예를 들면 최대 21 개의 LED의 밝기를 제어하게 0 ~ 100 % (듀티) 사이의 펄스 폭을 생성하도록 구성 될 수있다.
ServoBlaster 당신이 명령을 보낼 수있는 장치 파일은 / dev / servoblaster을 만듭니다. 이 명령의 형식은 다음과 같습니다
이게 다예요. 서보 블래스터가 설치됩니다. 이 순간부터, ServoBlaster이 두 종을 인식 할 수 있습니다 :
servo 0 ==> p1-11
servo 1 ==> p1-16
에코 명령은 동일한 결과로, 위의 형식 중 하나로 실행할 수 있습니다 :
echo P1-11=40% >/dev/servoblaster
echo P1-16=60% >/dev/servoblaster
or
echo 0=40% >/dev/servoblaster
echo 1=60% >/dev/servoblaster
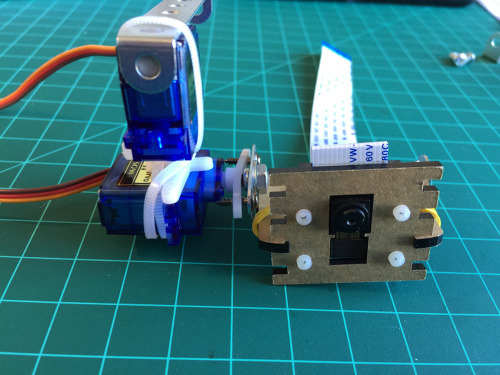
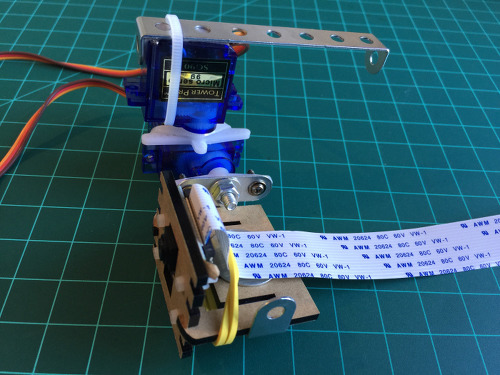
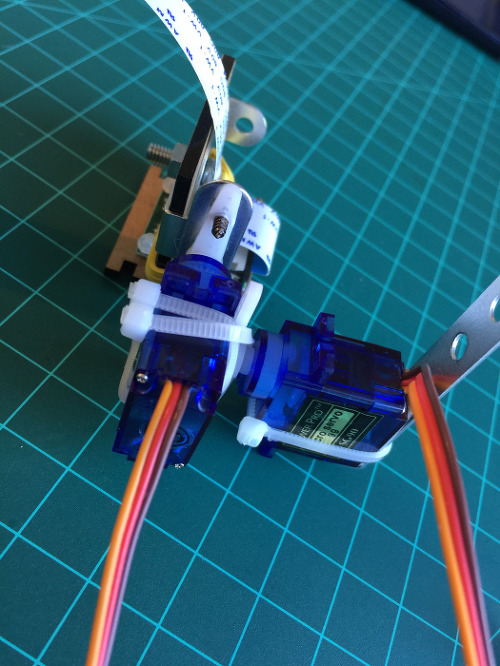
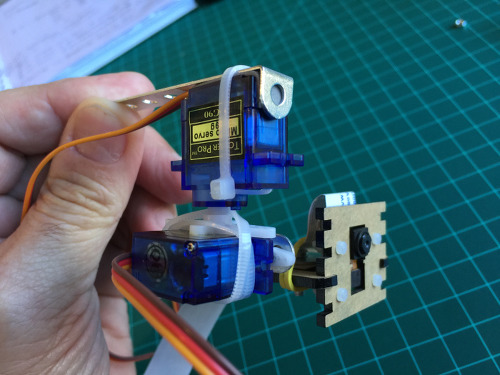
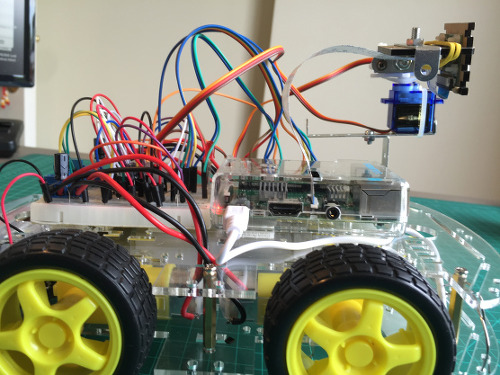
기구 조립 PAN / TILT
이 시장에 여러 팬 / 틸트 메커니즘이 있지만, 난 그냥 종을 묶는 당신이 아래의 사진에서 볼 수 있듯이 물린 함께 매우 간단한을 넣어하기로 결정했다 :
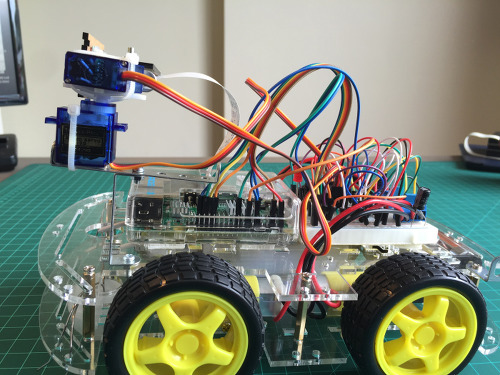
서보를 RPI에 설치하기
위와 같이, RPI에 종의 데이터 케이블을 연결합니다.
은 RPI에 별도의 전압 소스에 + V 두 종을 연결합니다 (물론, GNDS이 연결되어 있어야합니다). 당신이 로봇의 팬 / 틸트 메커니즘을 설치합니다 후에는 DC 모터에 사용 된 것과 동일한 배터리 (9V)를 사용할 수 있습니다. 이 경우에있어서, 6V의 전압 레귤레이터가 요구된다.
서보을 테스트하려면, Servoblaster의 명령 “에코”를 사용합니다. 당신은 백분율로 어느 각도 값을 사용할 수 있습니다. 당신의 팬 / 틸트 메커니즘 최선의 범위를 테스트 :
TILT Servo:
echo P1-11=20% >/dev/servoblaster (looking down)
echo P1-11=60% >/dev/servoblaster (looking front)
echo P1-11=90% >/dev/servoblaster (looking up)
PAN Servo:
echo P1-16=30% >/dev/servoblaster
echo P1-16=62% >/dev/servoblaster
echo P1-16=90% >/dev/servoblaster
우리는 쉽게 스크립트는 종의 위치를 제어 할 수 있습니다. 예를 들어, 우리는 아래의 파일을 작성해야합니다 발견 된 값을 기준으로 카메라 “기대”를 위치 쉘 스크립트를 만들 수 있습니다 :
sudo nano cam_view_front.cgi
#!/bin/bash
echo P1-11=60% >/dev/servoblaster
echo P1-16=62% >/dev/servoblaster
스크립트가 생성되면, 우리는 당신에게 실행할 수있는 권한을 부여해야합니다 :
sudo chmod 755 cam_view_front.cgi
이제 스크립트를 실행합니다 :
./cam_view_front.cgi
에코 명령을 사용하여 임의의 위치에 카메라를 이동 한 다음 새 스크립트를 실행합니다. 당신은 카메라가 자동으로 위치 “정면”으로 돌아갑니다 것을 볼 수 있습니다.
계속해서, 같은 아이디어는 다른 가능한 카메라 위치에 도포한다.
내 페이지를 생성하기 위해, 나는 TILT 5 중간 위치 및 이동하려면 5 중간 위치를 만들하기로 결정했습니다. 당신은 또한 더 단단한 위치의 변화에 대해 “슬라이더”를 사용하도록 선택할 수 있습니다. 당신이 결정한다.
스크립트 “cam_view_front.cgi”에 기재 한 바와 같이 10 개의 새로운 스크립트를 작성, 같은 원리를합니다 사용 :
leftpan.cgi ==> 90%
leftcenterpan.cgi ==> 76%
centerpan.cgi ==> 62%
rightcenterpan.cgi ==> 46%
rightpan.cgi ==> 30%
downtilt.cgi ==> 20%
downcentertilt.cgi ==> 40%
centertilt.cgi ==> 60%
upcentertilt.cgi ==> 75%
uptilt.cgi ==> 90%
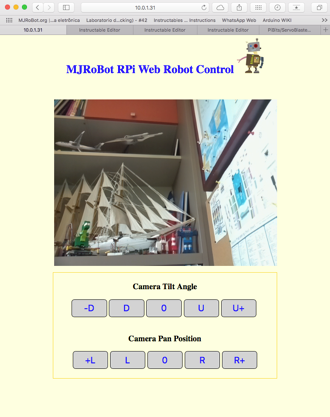
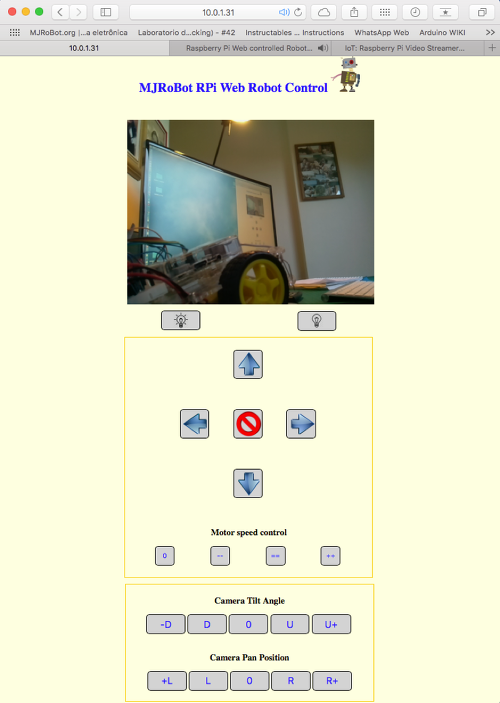
카메라를 제어 ONE PAGE의 HTML을 생성하기
우리는 카메라의 스트리밍 만든 index.html을 사용, 우리가 이전에 만든 스크립트를 실행하는 함수를 호출 10 버튼이 포함됩니다.
이하, 전체 HTML 코드 페이지를 만들 수 있습니다 :
index.html을 페이지에 HTML 코드
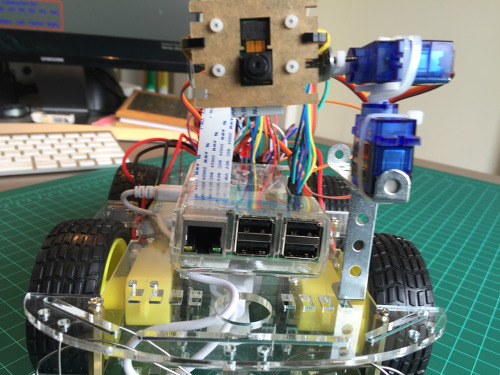
로봇에 카메라와 종들을 포용.
이제 우리는 우리의 RPI 스트리밍 비디오가 인터넷을 통해 카메라를 배치 할 수 있습니다, 우리는 첫 번째 부분에서 만든 로봇 프로젝트의 두 번째 부분을 통합 할 것이다.
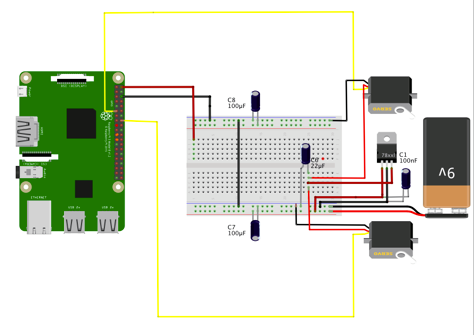
포스트의 선두의 블록도, 프로젝트가 통합 될 수있는 방법을 설명하고 아래 회로 접속 방법을 보여
이어서 두 번째 부분 및 부분의 추가 버튼 및 모터의 제어를위한 제 1 생성 함수로 개발 된 웹 페이지를 가지고.