Tag: Drawing Robot
4xiDraw V1 / XL – Drawing Machine
4xiDraw V1 / A4 Green – Drawing Machine
4xiDraw V1 / A4 – Drawing Machine
4xiDraw V1 Series – Line-Up
iDraw Board V1 – MultiTools Machine – Design Concept
iDraw Pro V2 (CoreXY) – MultiTools Machine – Design Concept
iDraw eX V2 – Drawing Machine – Design Concept
Arduino Polar V Plotter
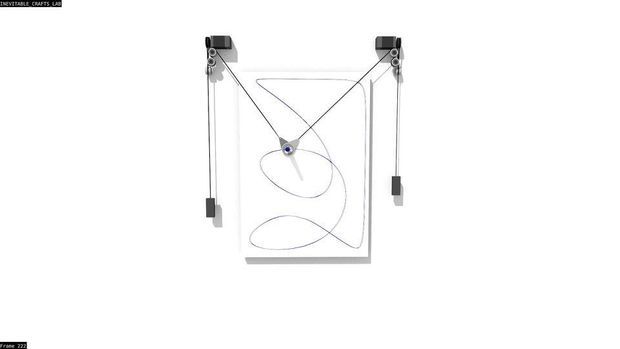

This Instructable will be about Polar Plotters.
There are a lot of different versions to build one, and i just wanna share how i built it.
The Software i use is called Makelangelo, and can be downloaded here:
If you have further questions or ideas to perfect my design, please feel free to comment 🙂
Watch it draw:
And the idea of the penholder, as video:
Step 1: GENERAL_ COMPONENTS BOM

BILL OF MATERIALS
(all prices like i paid on amazon)
2 stepper motors 2×25$
I used NEMA8 and NEMA17. Both work well, the 8beeing a quarter of the size of the 17.
If you want to get an idea for the numbers of NEMA steppers, its 1/10 of the distance between two nearby mounting holes. In inches.
So in a NEMA 8 motor, the mounting holes are placed on an 0,8″x0,8″ square. Pretty tiny.
Stepper motor drivers 30$ from adafruit or 8$ clone
As i used the Makelangelo firmware, i used an Adafruit Motorshield v1 (clone)
Makelangelo runs with(out modification) on an Uno with AMShield v1 and v2, and with a MEGA 2560 and the RAMPS 1.4 shield.
I tested the uno with v1 and the RAMPS setup, both work.
Micro servo or Solenoid 5$ each
Both work, the solenoid is the more elegant option, but needs some tweaks to the firmware.
You can take virtually any servo available.
On my penholder, i use a standard 5$ microservo, as you can see on some photos.
Belt/Chain 12$ (see dedicated step)
The cheaper and more elgant version is the belt.
I still used white pearlropes from home depot first, because i didnt know that 5m belt with 5 pulleys are 12$ on amazon.
Pens (see dedicated steps)
It sucks pens dry like nothing, so ballpens are the most efficient, copics the most expensive
Step 2: ELECTRONICS_ ADAFRUIT SHIELD ARDUINO
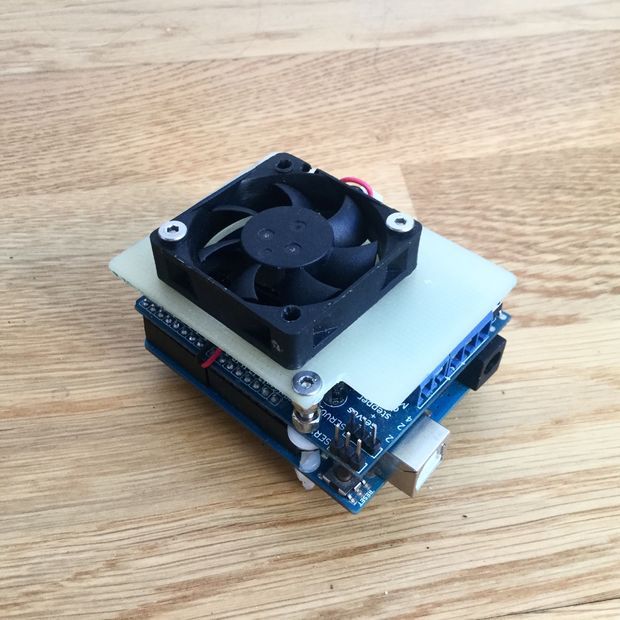
I used an Arduino (Genuino) UNO, but ordered a feather M0 with a stepperwing, to make it more compact.
There isnt any special thing to consider, just plug the shield to the arduino and give it the code 🙂
On thing i found out is, the L284 drivers get really really hot, so if they didnt came with heatsinks, better add some, or mount a fan like i did.
Probably both, depending on the motors/weight.
To mount the cooling fan i took a sheet of 3mm fibreglass and cut it with a jigsaw.
The fan is pretty strong and loud, i probably add a pot in the future to tune it down a bit.
Step 3: MECHANICS_ BELTS ROPES PEARL-ROPES

Basically there are three systems.
Beginning with the worst possible version:
A spindle and some rope.
The problem is, that with spooling of the rope, the spindle-diameter changes, so the calculation isnt correct anymore, which ends in wacky drawings.
A Pearlchain from window-shutters.
Very light and precise setup. I have built a big plotter for shop windows and liquid chalk that uses two 3m ropes.
The problem with the rope and the pearls is, that it needs special idler pulleys if you wanna use idler pulleys at all.
A belt from 3d printing spares
To me the best and most affordable version is a 5mm belt. As i wrote earlier i bought 5m of belt together with five teeth pulley for 12$ on amazon.
Its super precise, though i think it flexes more then the rope.
Step 4: MECHANICS_ STEPPERS MOUNTS IDLER-PULLEYS
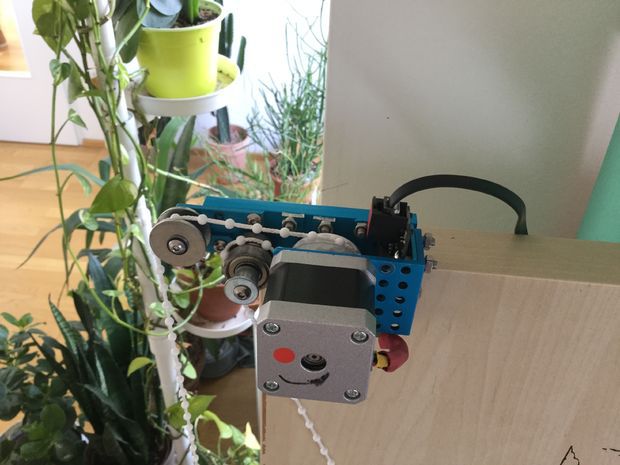

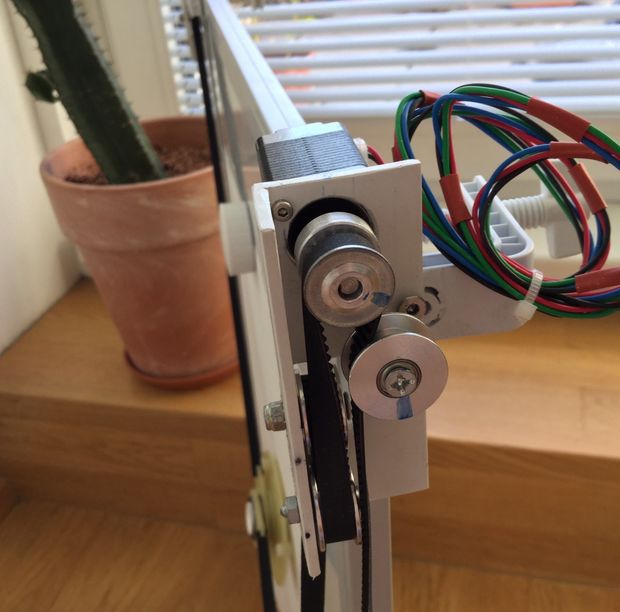
The easiest and cleanest version is to just mount a teeth pulley on the motor and let it go.
Be sure to add some counterweight, to prevent slip.
If you want or need to make it more complex, i added some photos, that solve different problems i had at that time.
On the NEMA17 stepper photos:
One thing i always tried to do was to keep distance between the left and right idler pulley as wide as possible.
In a polar v plotter, one situation that is sub-optimal is, when one of the belts hangs down vertically.
Thats the position where the motors have the least control about what the pen is doing.
I tried to avoid that, by mounting the last idler pulleys wider then the canvas.
Next i had to mount a second idler to get the counterweight out of the line.
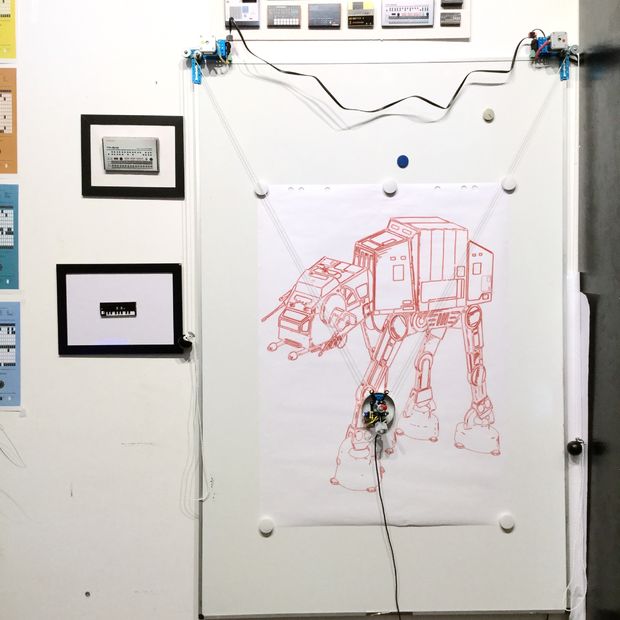
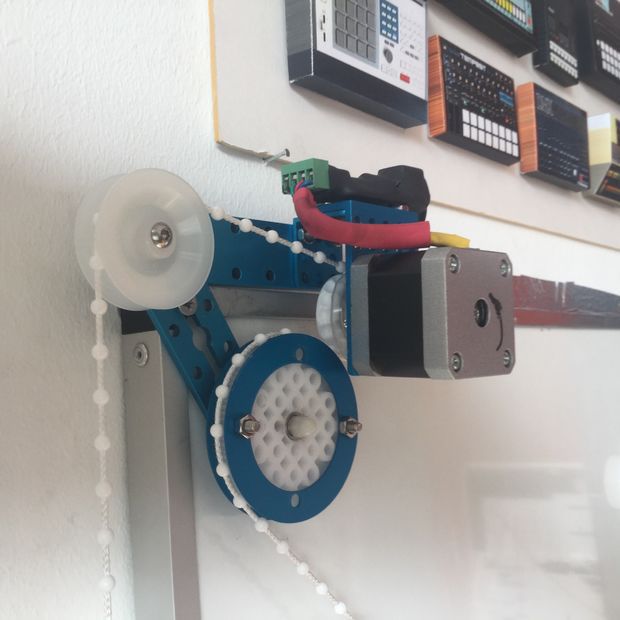
On the NEMA 8 photo:
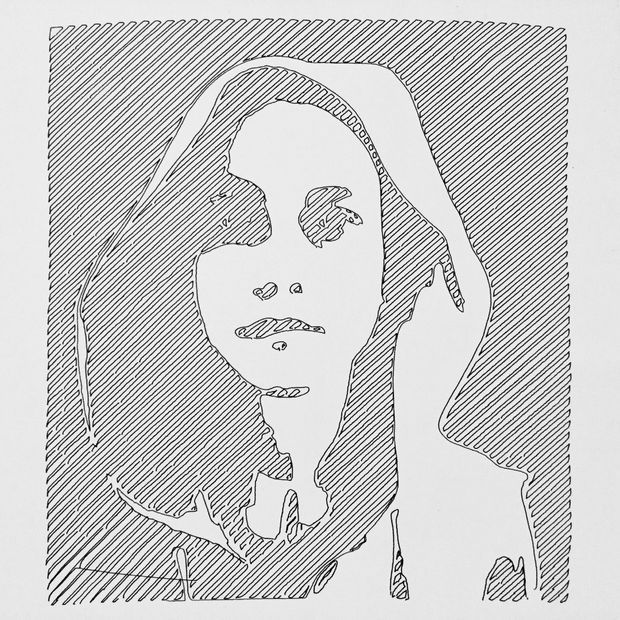
This will be a small A3 version, that hangs on the wall, framed, and takes portrait of random people.
O the goal was to make it as flat as possible. As you can see there is one 90degree twist in the belt to get the motor parallel to the wall.
All idlers have double ball bearings and run supersmooth
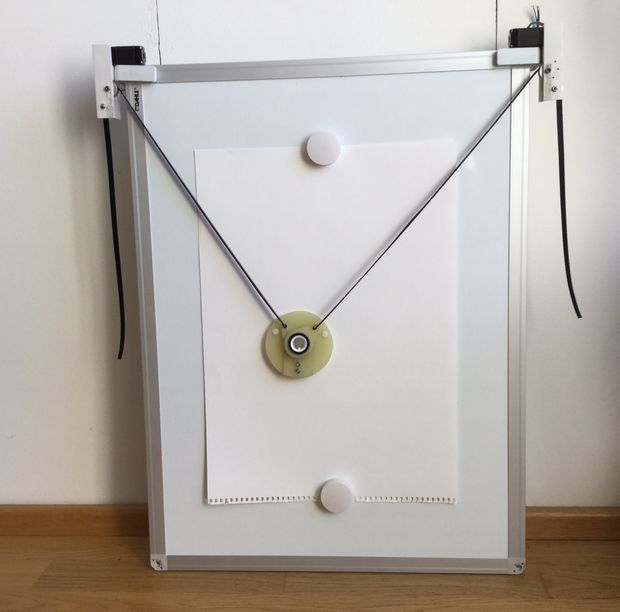
Step 5: MECHANICS_ PEN GONDOLA




There are endless versions how to mount a pen and lift a pen hanging on two ropes.
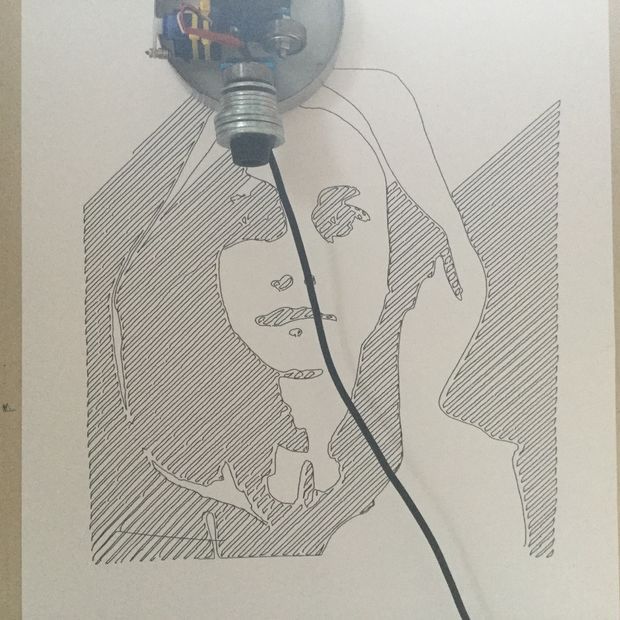
The blue penholder on the photos is made from a segafredo coffeecan some makeblock parts and a servo.
The second (yellow) version is made for endless-lines drawings (without lifting) and is made of three ballbearings and three 3mm fibreglass parts.
If anyone is interested in the second design, i will get a 3d printer very soon, and can add a 3d file as soon as i tested/printed it on my printer.
Step 6: MECHANICS_ DRAWING SURFACES SIZES PAPER-FORMATS

I would say there are three classic surfaces for a plotter like that:
First the surface where the polar v plotter is the only plotter capeable to draw on:
Shopwindows/ windows in general
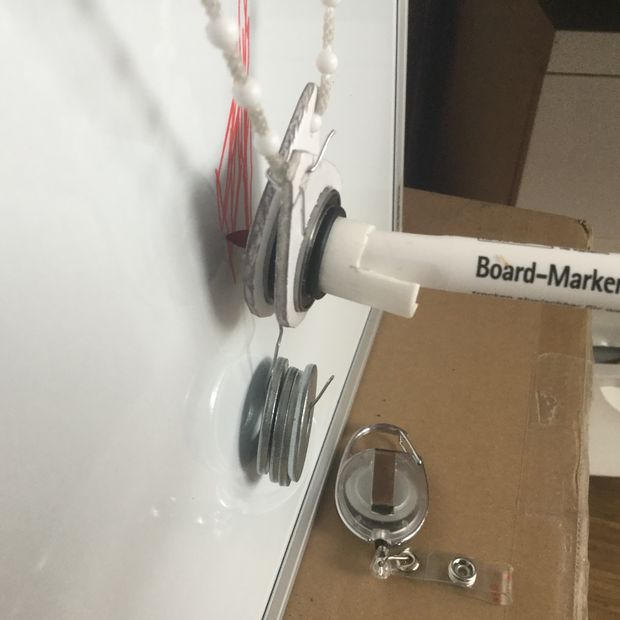
For drawing on windows, besides mirroring the graphics (which Makelangelo can do in the software) you need suction cups/glasslifters and liquid chalk pens.
Liquid chalk seems to be some sort of chemical substance that you can paint on windows with and easily wipe it of to clean the windows.
Its filled in a regular boardmarker sized pen.
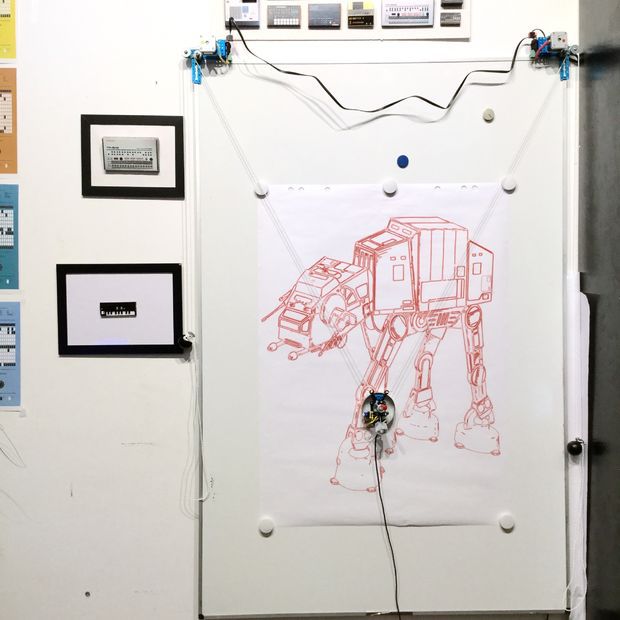
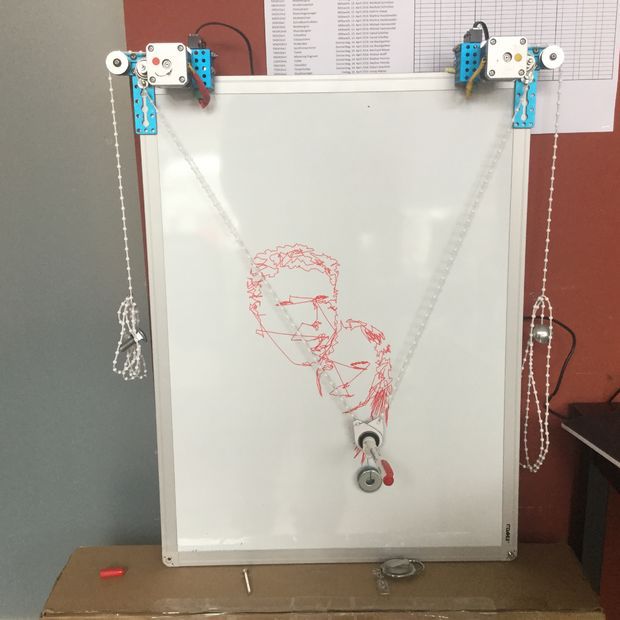
Whiteboards
Also easily removable and a perfect surface to permanently mount a drawbot.
you can test directly on the whiteboard without wasting paper, and once it runs smooth, just use four magnets and put a paper on it.
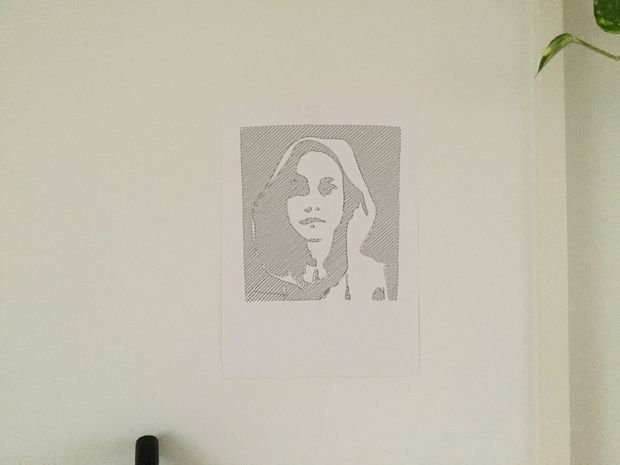
Paper in general, obviously
The rougher the paper surface, the better.
The less preassure a pen needs to write, the better.
Even if the pen holder is heavy, it puts a very tiny force on the actual drawing surface.
You can always add force, by tilting the surface backwards.
On the big whiteboard plotter i mounted in my office i lifted the base of the whiteboard by 2″/5cm to get some angle.
Step 7: SOFTWARE_ MAKELANGELO
That’s pretty straight forward, just visit their site, and download the files.
Dont forget to contribute a bit, so they can keep on developing fine software like Makelangelo
The code, and java is well documented, so i wont discuss it in detail.
Step 8: GENERAL_ WHAT ABOUT …
Some ideas, what to do with a plotter like that, and how i use it.
On a whiteboard in the office
I work for a creative school and i got it in my office, to plot svg files graphic design students made, or print other stuff i would normally write on it, like xls sheets etc
With a laser-head on wooden doors, print foilage on hunterstands etc
With a spraycan on a housewall
With a felt tip on a dirty window
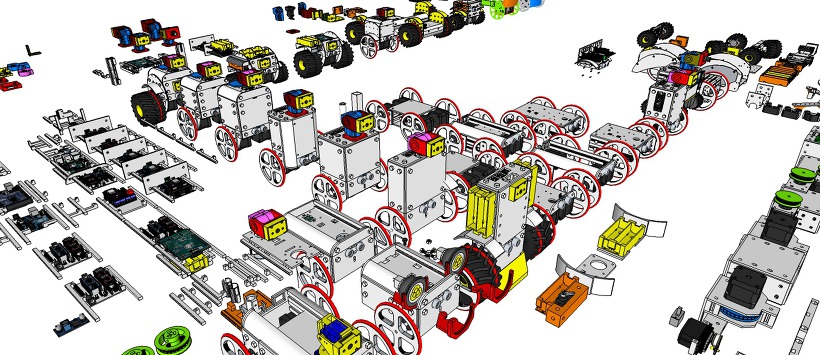
ProfileBlock™ – DIY Robot Platform – Design Concepts
[ Upload design concept 20170418]
ProfileBlock – DIY Robots & Rover & RC & Etc. Platform
3D Design Tool: SketchUp Pro
ProfileBlock’s robots are built on top of an open source Arduino-based(with ESP8266, Raspberry Pi) platform.
-
- drawBot: Drawing Robot (Polargraph, Pen, …
- Rover
Self Balancing Robot (eX-Robot, B-Robot, Roverbot, …
- RC Car
- Drone
- Scara Arm
- Arm Robot
- XY Plot
- 3D Printer
- HomeIoT
- Etc…
Hardware
Base Plate(Parts):
- Profile DF 2020
- Profile DRF 2020
- Acrylic Plate
- 3D Printing Parts
Step Motor:
- NEMA 17 – Phase: 4, Step Angle: 1.8 Deg/Step, Holding Torque: 2.6Kg.cm
- 28BYJ-48
Servo:
- Standard Servo
- SG90 Servo
Electrical
Control Board:
- Arduino
- ESP8266
- Raspberry Pi
Power Requirements:
- 4.2DVC
- 8.4VDC
- 12 VDC
Battery:
- 18650 x 2ea
- 16340 x 2ea
The open source ProfileBlock hardware and software is free and made with love. Please show your level of support with a voluntary donation.
Donate:
https://www.paypal.com/cgi-bin/webscr?cmd=_s-xclick&hosted_button_id=RDN7ZGAVFS5UE