
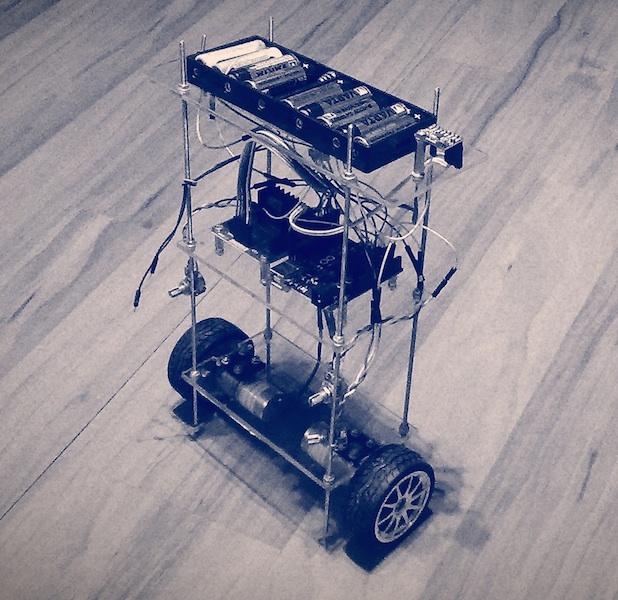
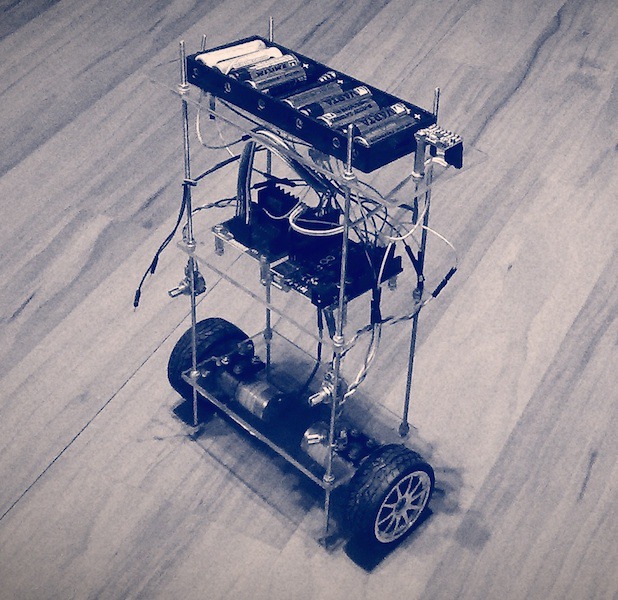
My latest Arduino DIY project is a self balancing robot.
Arduino Uno R3 microcontroller board is used for this project. MPU6050, an 6DOF IMU (with accelerometer and gyroscope) is used to get the angle and L298N motor controller board controls the 2 motors.
The motors are 12V 122rpm and the wheels are 8cm in diameter.
Robot size is 17x10x30 cm. Three plexiglas plates are used to hold the frame and parts. Standard PID controller is used to control the robot. To tune the PID controller parameters 3 potentiometers are used.
You may find the Arduino sketch and libs on my GitHub repo: https://github.com/lukagabric/Franko
Parts:
1 x Arduino Uno R3
1 x MPU6050 (IMU)
1 x L298N Motor Driver Controller
2 x 12V 122 RPM Gear Motors + 80mm Wheels
3 x 10k Potentiometer