
H-Bots
There is a family of 2 axis mechanisms called H-Bots. They use 2 motors on a single belt to generate motion in 2 axes. The most basic type is the classic H-Bot. ‘H’ comes from the outline of the belts.
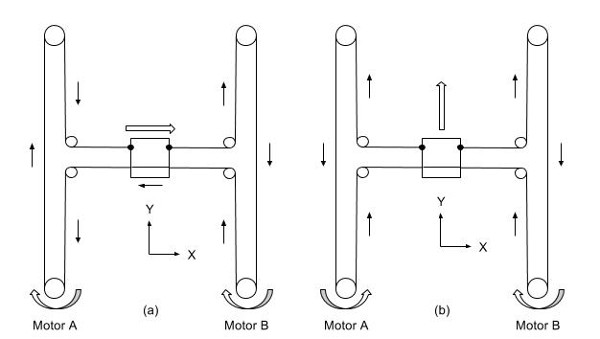
Image from Galil Motion Control
The motors turn the same direction for motion in one axis. They turn opposite directions for motion on the other axis. If only one motor turns both axis will move evenly (like 45°, etc). All other angles are possible with the right drive ratios.
CoreXY
The H-Bot is simple, but imparts some twisting forces on the mechanism under some loads that work against accuracy. For example, look at left diagram in the image above. The belt is pulling down on the left side of the ‘H’ and up on the right side. This tries to twist the gantry if there is a resistance to the carriage movement in X. CoreXY addresses this by crossing the belts at one end. A longer belt does increase belt stretch issues though.
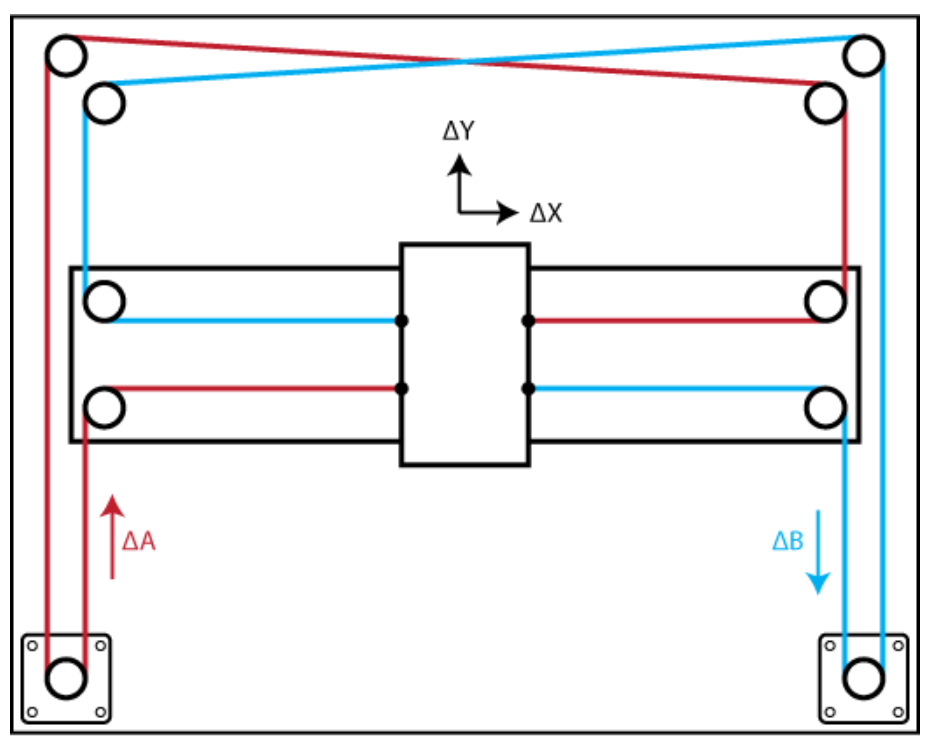
Image from CoreXY.com
T-Bots
T Bots are the simplest variety and work well with light loads.

I actually played with a T-Bot concept way back in 2011.

The AxiDraw is a good example of a T-Bot.
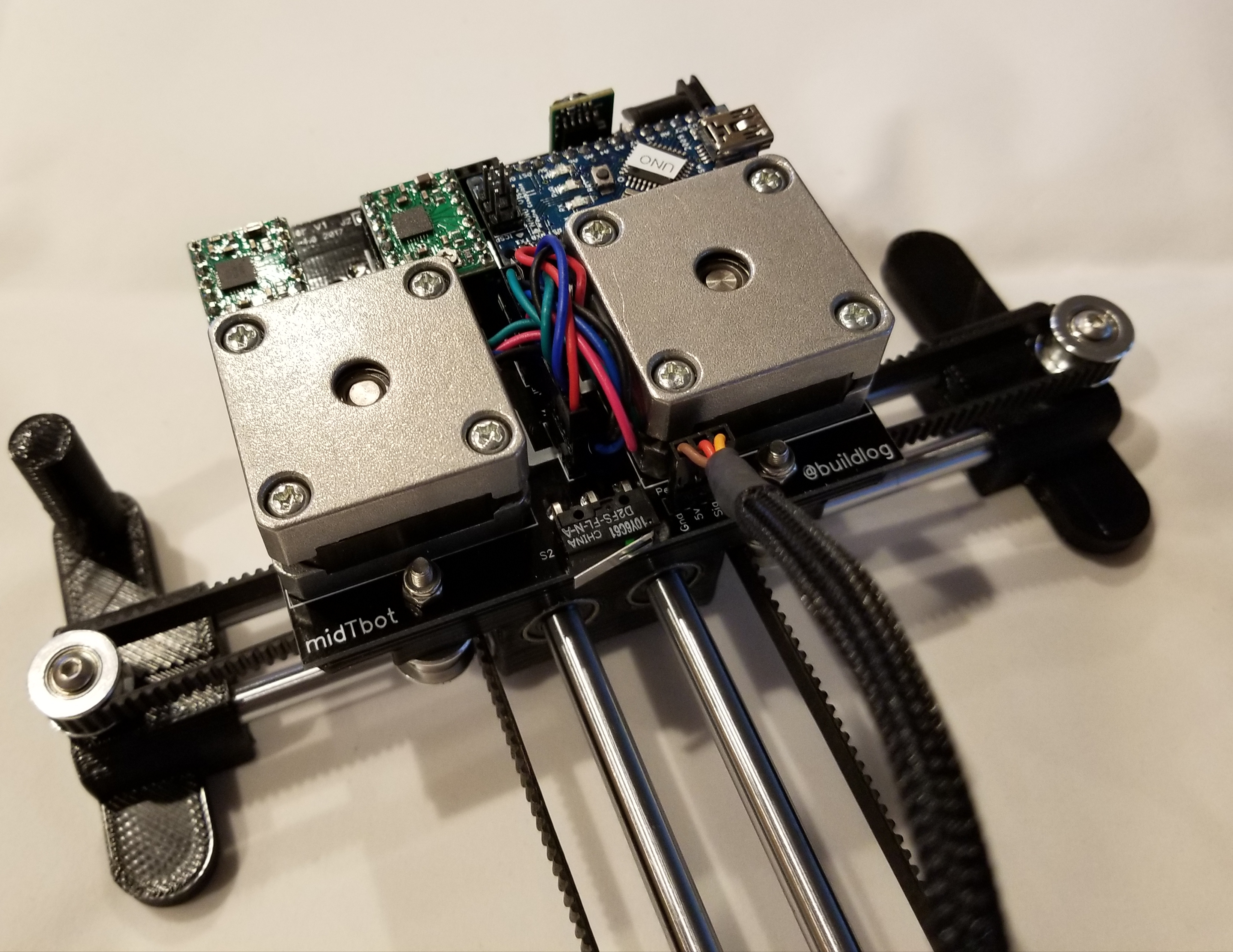
The midTbot
I was trying to make the smallest and simplest drawing machine with a reasonable work area. T-Bots are pretty simple, but the motors on the ends seemed to waste space. I also wanted integrated electronics. Moving the motors to the middle carriage seemed to solve a lot of these problems. It does add the motors to the mass of the moving parts, but only on one axis and they are directly over the linear bearings. It really has an elegant and smooth look to it. The midTbot name comes from middle mounted motors on a T bot. Here is an image of just the XY mechanism running.

Electronics
The ideal place for the electronics is right by the motors. This will reduce the wiring as much as possible. Putting the homing switches on the middle carriage would further clean up the wiring.
I designed a modular controller that mounts to the top of the middle carriage and under the motors.

The controller will soon be available on Tindie.

Scalability
It is very scalable because you only need to change the rod and belt lengths. No wiring needs to change. The middle mounted motors makes the platform very stable, but if allow the pen carriage to go too far forward, it could tip forward. I think you would need to extend the feet a little forward to counteract that.
Demo
Here is a demo video of the complete machine.
Source Files (Open Source – Creative Commons – Share Alike – Attribution 4.0)
- STL files: These are on Thingiverse
- PCB
- DipTrace Files: MidTBot_PCB_V1
- Gerber Files: midTbot_Gerber_v1